

Mobile robot based on three-freedom-degree vision platform and control method of mobile robot
A mobile robot and vision platform technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of single structure, inability to regularly and automatically monitor the safety status of mobile robots, and inability to make full use of them
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings.
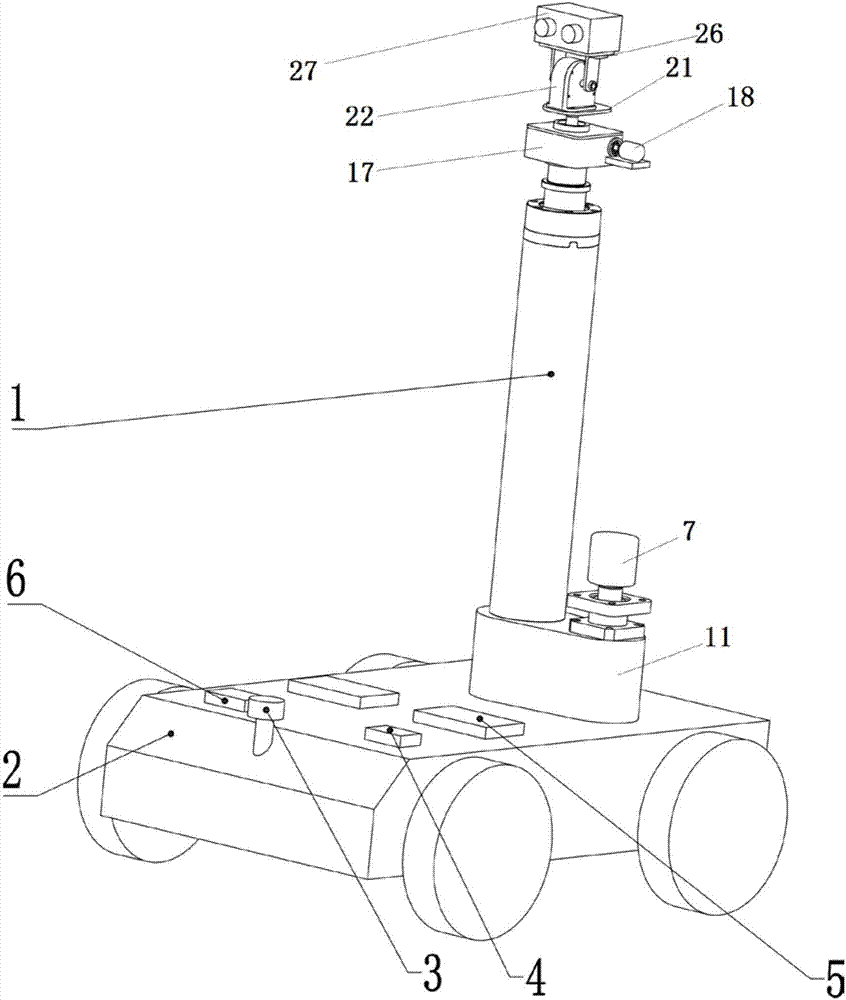
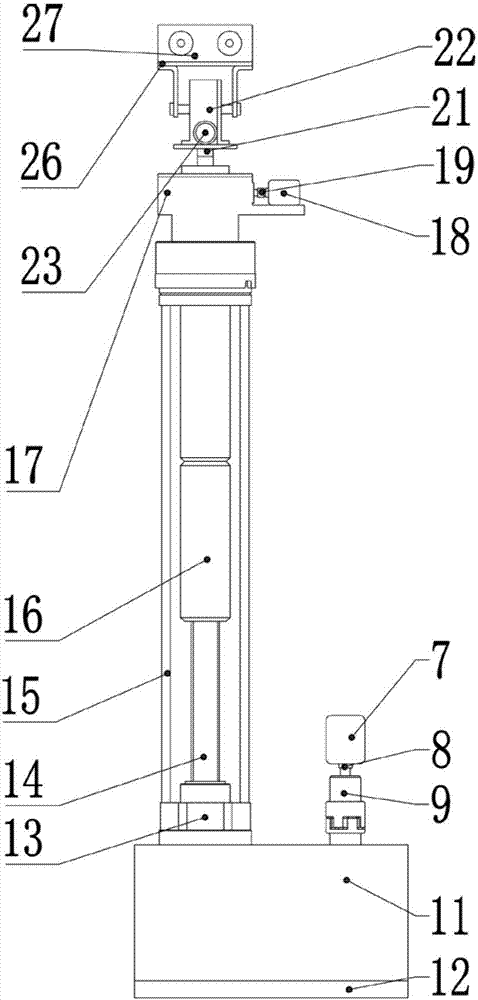
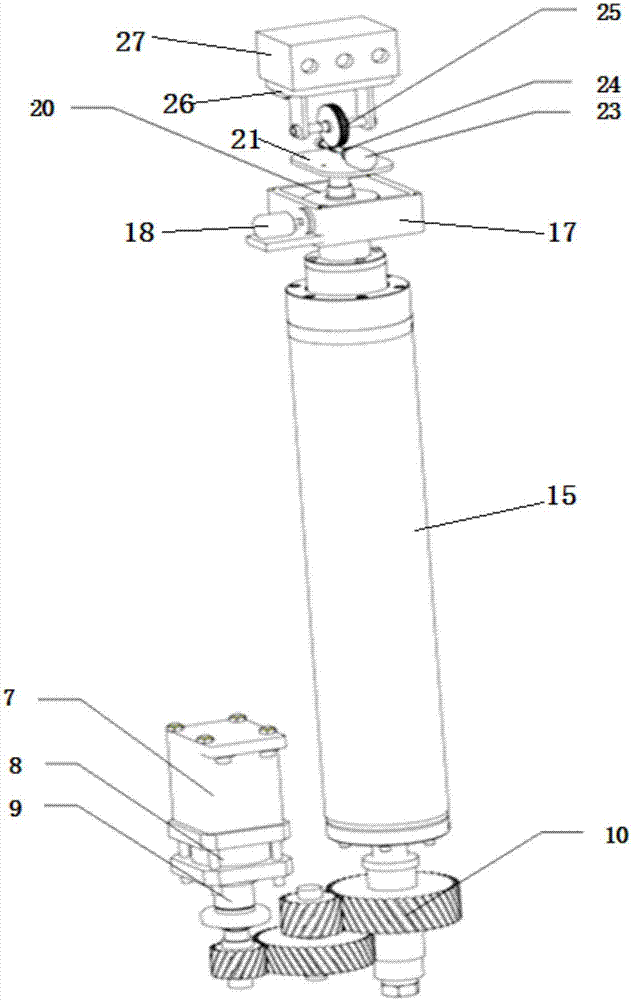
[0032] Such as Figure 1-4 , a mobile robot based on a three-degree-of-freedom visual platform, including a three-degree-of-freedom visual platform 1, a mobile robot body 2, a laser radar 3, an Arduino board 4, an industrial computer 5, and an inertial measurement unit IMU6; wherein:
[0033] The three-degree-of-freedom vision platform 1 is placed on the robot main body 2. The three-degree-of-freedom vision platform 1 includes a telescopic platform, a rotating platform, and a pitching platform. RGB-D cameras 27 are installed on the pitching platform. The telescopic platform, the rotating platform, and the pitching platform use The RGB-D camera 27 realizes three degrees of freedom in telescoping, rotating and pitching;
[0034] The bottom of the mobile robot main body 2 is provided with wheels; the laser radar 3 is fixed on the front end of the robot main body 2, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More