

A Visual Detection Method of Spatial Arc Pose
A space arc and visual detection technology, applied in photogrammetry/video metrology, measuring devices, surveying and navigation, etc., can solve the problem of increasing the complexity of the solution and the amount of calculation, the amount of calculation is large, and it is difficult to quickly obtain a single circle The exact position of the center point, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
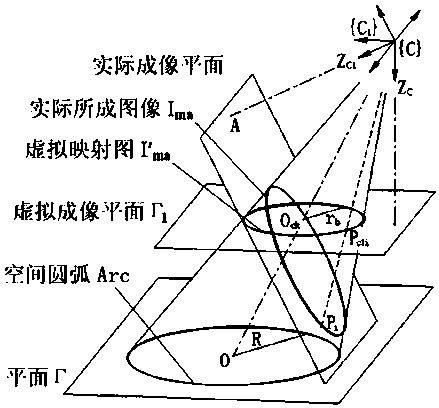
[0040] Such as figure 1 As shown, the visual detection method of the space arc pose of the present invention is to use the space arc A rc Mapped to the virtual camera coordinate system {C 1}’s virtual imaging plane Γ 1 , to build a space arc A rc The actual image I in the actual camera coordinate system {C} ma with the virtual camera coordinate system {C 1} The virtual image I' mapped in ma Mathematical conversion models between.
[0041] The established virtual camera coordinate system {C 1} coincides with the coordinate origin of the actual camera coordinate system {C}, and the coordinate system {C} 1}Pose transformation matrix relative to the coordinate system {C} Described by formula (1):
[0042]
[0043] In the above formula (1), Rot(x,α) represents the rotation matrix corresponding to the angle α rotated around the x-axis; Rot(y,β) represents the rotation matrix corresponding to the angle β rotated around the y-axis; α, β is the coordinate system {C 1} Po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More