

Autonomous cooperation method of flexible connected double unmanned boats for oil spill roundup
A dual unmanned boat, flexible connection technology, applied in two-dimensional position/channel control, instrument, control/regulation system, etc., can solve the problem of the increased lateral distance of double unmanned boats and the low efficiency of oil recovery boats in recovering oil spills , oil spill capture failure, etc., to reduce adverse effects, smooth torque changes, and maintain consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
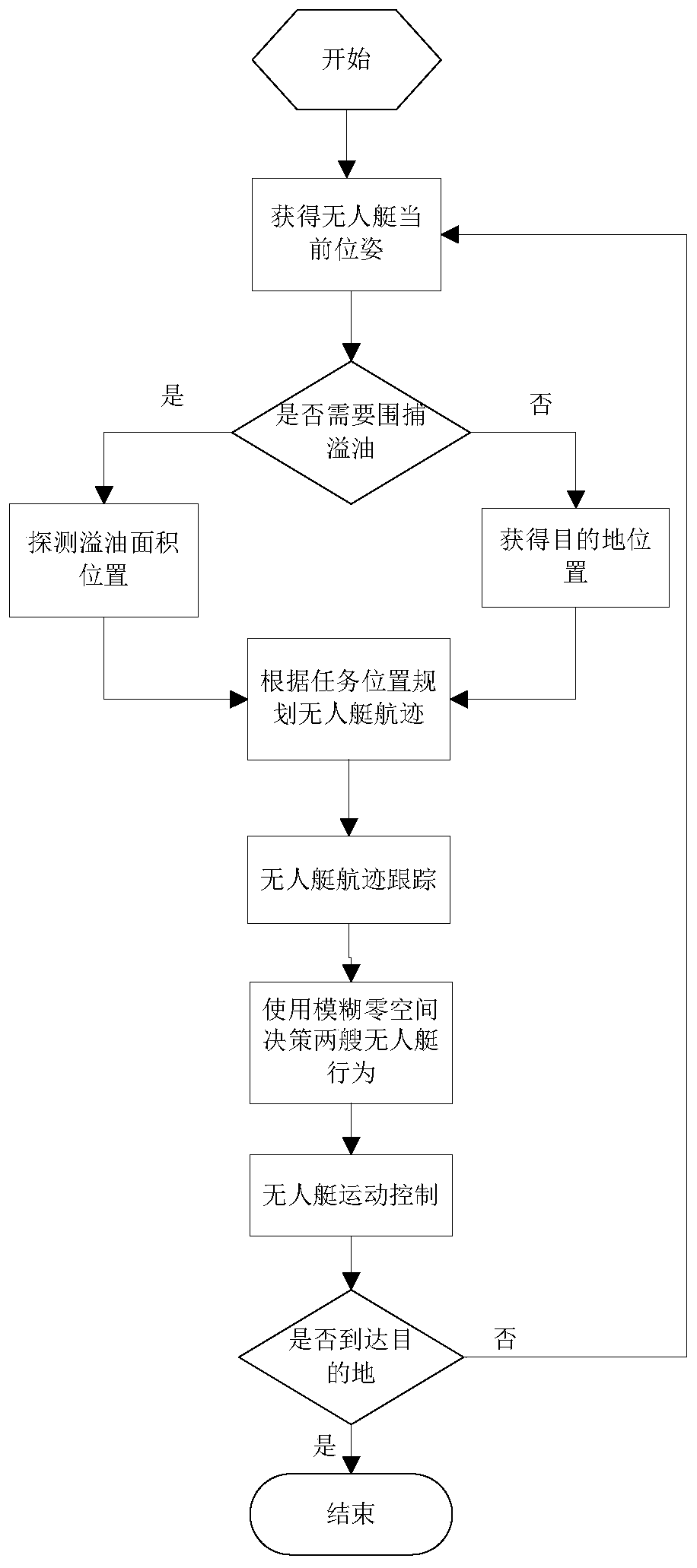
[0027] The flow process of oil spill round-up of the present invention is as figure 1 As mentioned above, first use sensors such as inertial navigation and GPS to obtain the current position and attitude status of the dual unmanned boats, and the dual unmanned boats judge whether it is necessary to round up the oil spill. If it is necessary to round up, it means that the double unmanned boat has not completed the work of rounding up the oil spill. At this time, detect the location of the oil spill and the area of the oil spill; Use flexible connections such as oil booms to carry the spilled oil to the destination, and at this time, obtain the location of the destination. In the next step, according to whether the dual unmanned boats are heading towards the oil spill location or the destination location, and the pose constraints whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More