

Mobile robot
A mobile robot and processor technology, applied in the field of mobile robots, can solve the problems of narrow emission angle of ultrasonic ranging sensors, missed detection of low obstacles, and not very beautiful, so as to improve the detection success rate, eliminate detection blind spots, improve The effect of user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions in the embodiments of the present invention will be clearly described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
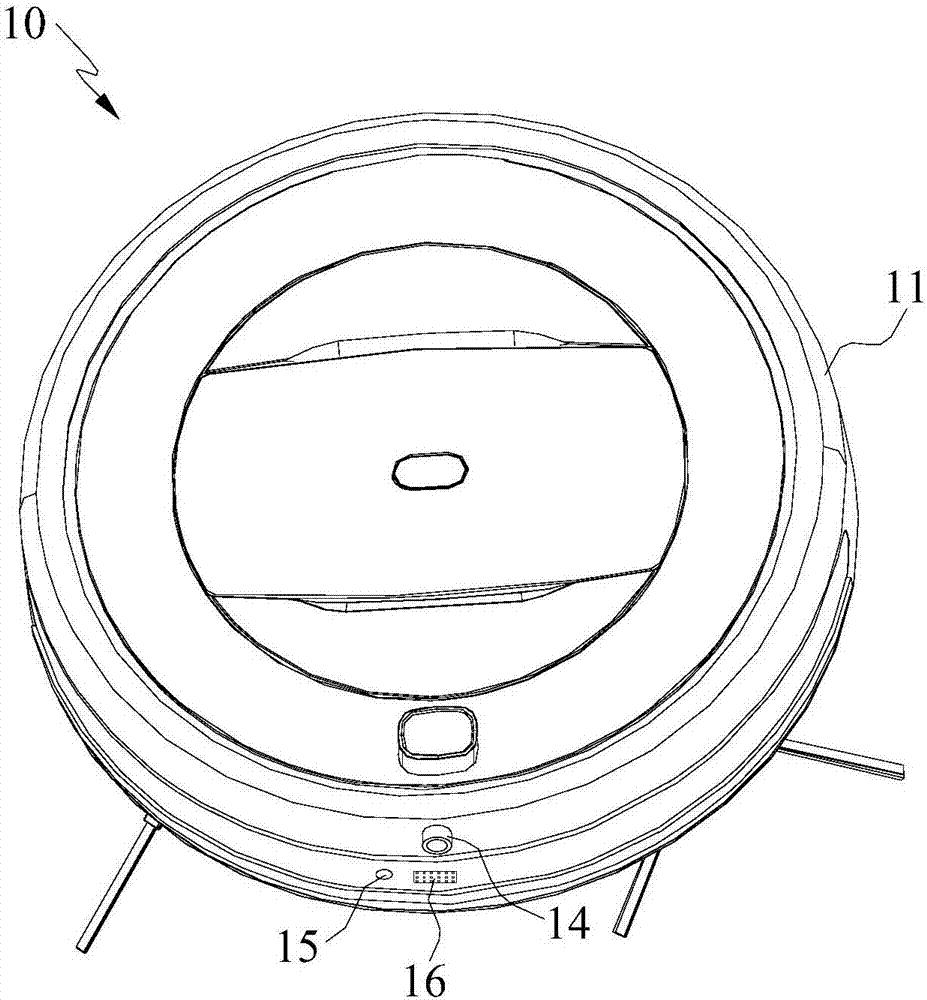
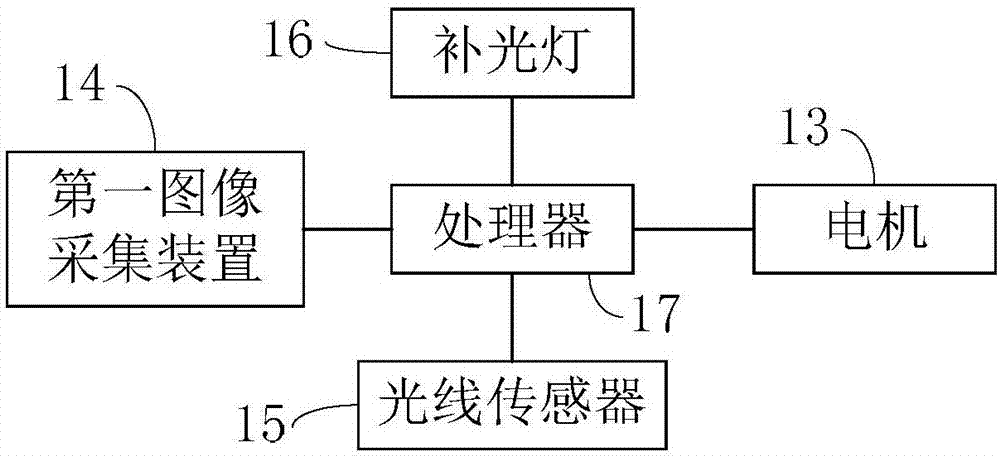
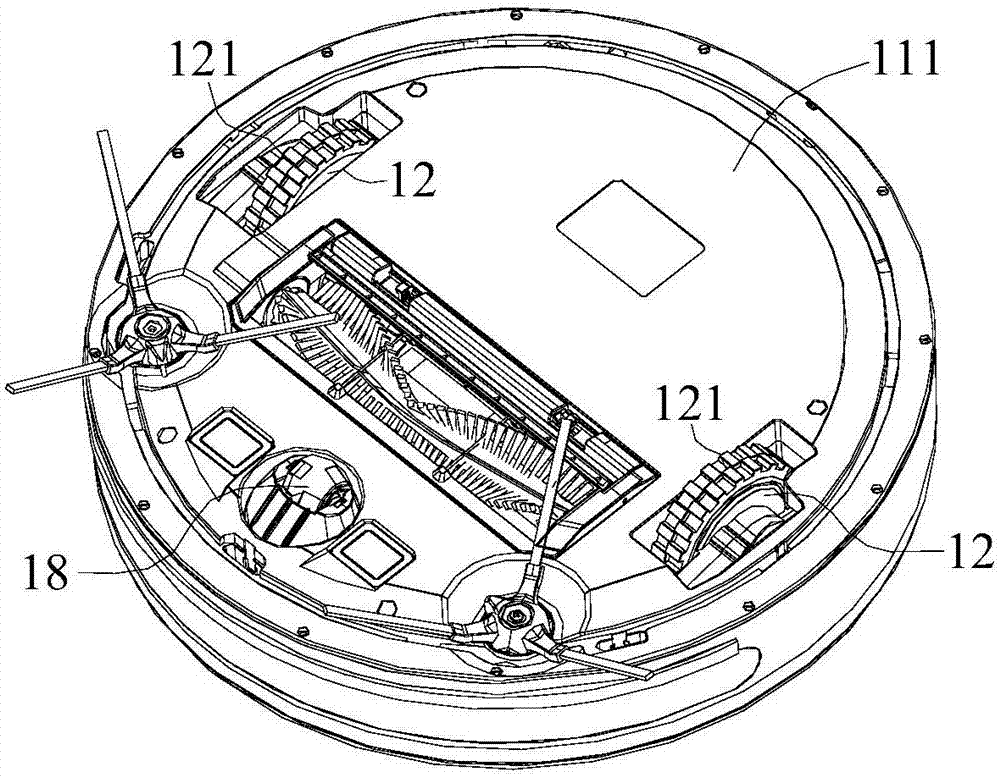
[0030] see figure 1 and figure 2 , figure 1 It is a top perspective view of mobile robot 10 in one embodiment of the present invention, figure 2 It is a circuit connection diagram of some electronic and electrical components in the mobile robot 10. In this embodiment, the mobile robot 10 is a cleaning robot. Mobile robot 10 comprises: body 11, wheel 12, motor 13, first image acquisition device 14, photoelectric sensor 15, fill light 16 and processor 17, wheel 12, motor 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More