

Method for rapidly calculating vehicle speed in area of interest of unmanned vehicle
An unmanned vehicle and region of interest technology, applied in the field of moving target detection and speed measurement based on 3D lidar, can solve the problems of real-time performance degradation and algorithm complexity increase
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
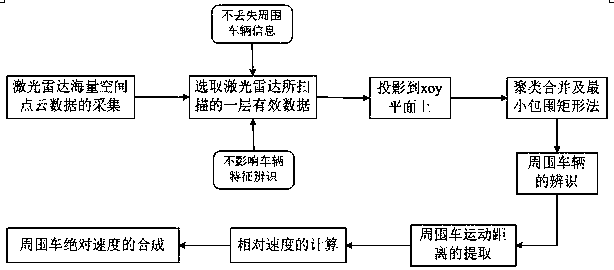
[0009] The present invention proposes a method for quickly calculating the absolute speed of surrounding vehicles in the area of interest of the unmanned vehicle based on three-dimensional laser radar point cloud data, which includes: selecting a certain layer of effective data scanned by the laser radar, and projecting it onto On the xoy plane; use the method of clustering and merging and the minimum enclosing rectangle to identify the surrounding vehicles in the area of interest of the unmanned vehicle; extract the movement information of the surrounding vehicles and calculate their absolute speed. The complete technical process such as figure 1 As shown, the details are as follows:
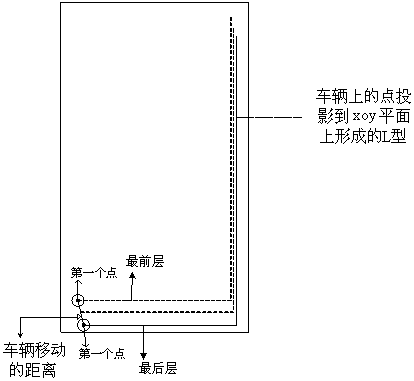
[0010] Step 1. According to the massive point cloud information scanned by the 3D lidar, select the scanned data of a certain layer (a certain height range) and project it onto the xoy plane.
[0011] The multi-line lidar is installed on the roof of the driverless car, which can collect th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More