

Industrial robot gripper
A technology of industrial robots and grippers, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of small finger opening and closing range, low grasping efficiency, complex structure, etc., and achieve compact structure, light weight, and easy opening and closing wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the following will briefly introduce the drawings that need to be used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description are only These are some embodiments of the present invention. For those skilled in the art, other drawings can also be obtained according to these drawings without any creative effort.
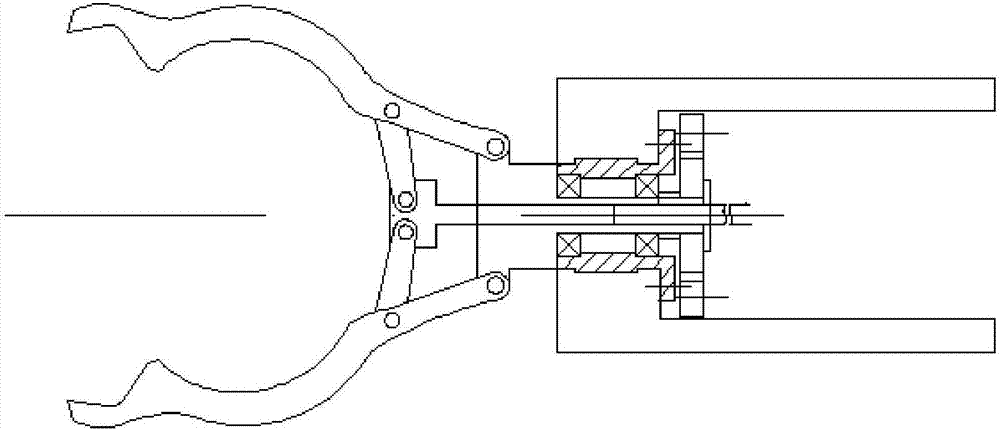
[0018] see as figure 1 —— figure 2 As shown, this specific embodiment adopts the following technical scheme: it includes finger 1, small pull rod 2, bracket 3, bearing 4, sleeve 5, large pull rod 6, U frame 7, clamping port 8, baffle plate 9, pin shaft 10. The two fingers 1 are connected to the side wall of the bracket 3 through the pin shaft 10, one end of the small pull rod 2 is connected to the large pull rod 6 through the pin shaft 10, and the other end of the small pull ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More