

An energy-saving elastic joint with variable stiffness based on differential gear train
A differential gear train and elastic joint technology, applied in the field of robotics, can solve the problems of large volume of variable stiffness joints, small range of variable stiffness, complex control, etc., and achieve the effect of small size, compact structure, and faster adjustment speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
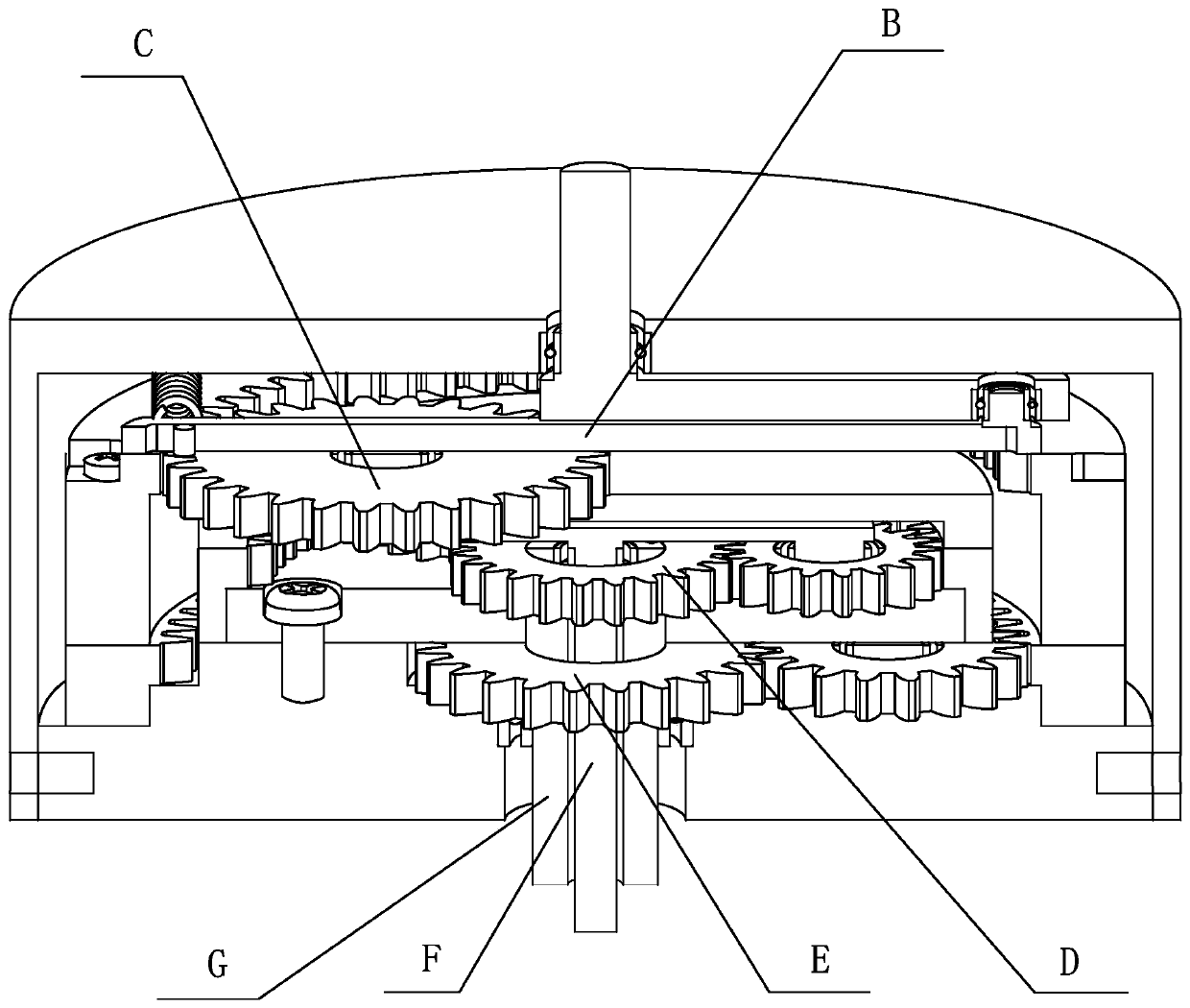
[0030] see Figure 1-Figure 6 Explain that an energy-saving variable stiffness elastic joint based on a differential gear train includes a housing A, a lever mechanism B, a differential gear train C, an input gear train D and an input gear train E;
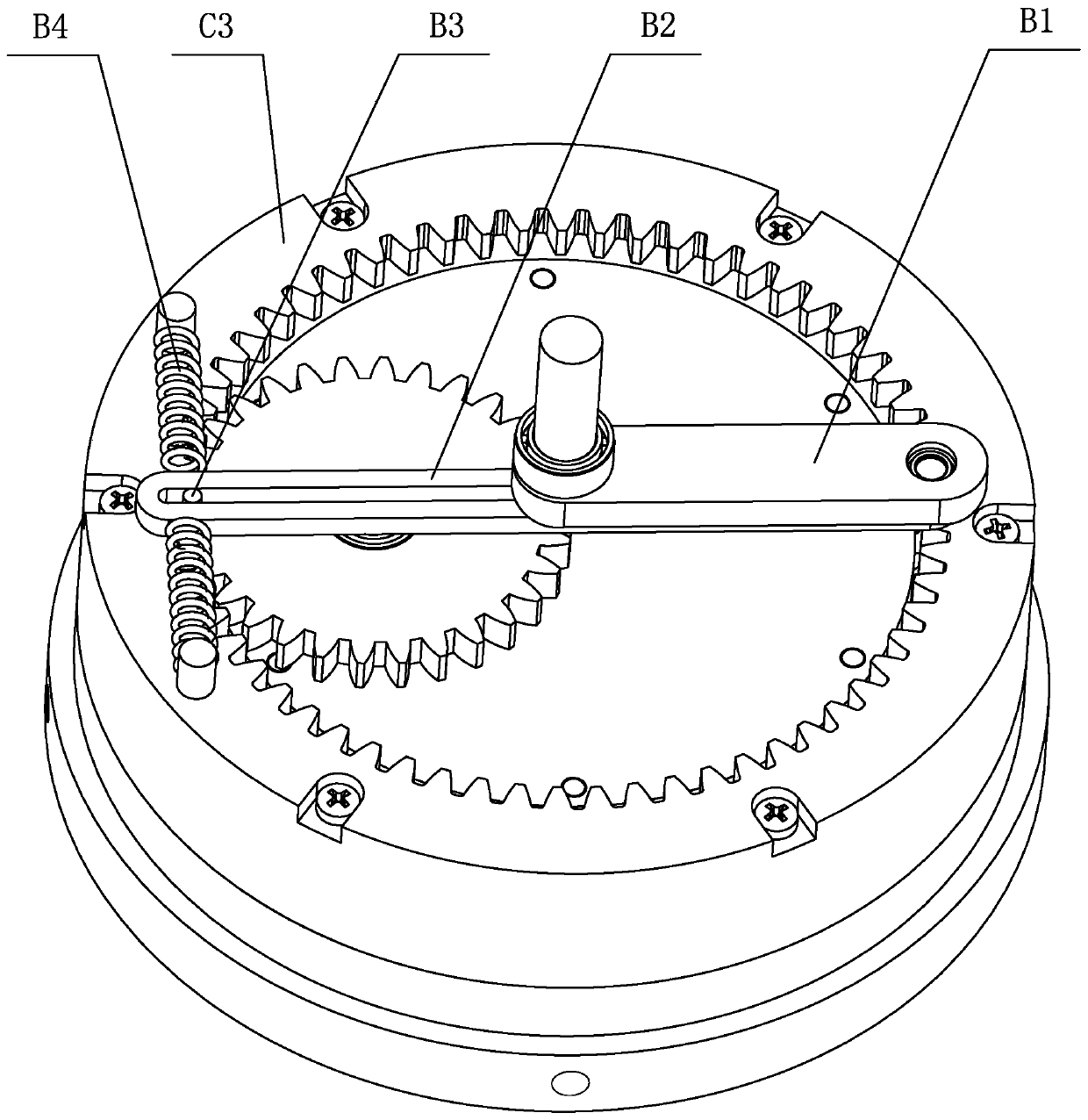
[0031] The lever mechanism B includes an output rod B1, a lever arm B2, a lever fulcrum column B3 and a spring B4;
[0032] The differential gear train C includes differential planetary carrier C1, differential planetary gear C2 and differential sun gear C3;
[0033] The input gear train-D includes the ring gear-D1, the planetary carrier-D4 and the gear train-H;
[0034] The input gear train 2 E includes the ring gear 2 E1 and the gear train 2 K;
[0035] One end of the output rod B1 is rotatably connected to one end of the lever arm B2, the other en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More