Indoor mobile robot positioning method and apparatus based on EKF/EFIR mixed filtering
A mobile robot and hybrid filter technology, applied in positioning, measuring devices, instruments, etc., can solve the problems of weak operating efficiency and poor accuracy of FIR filters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
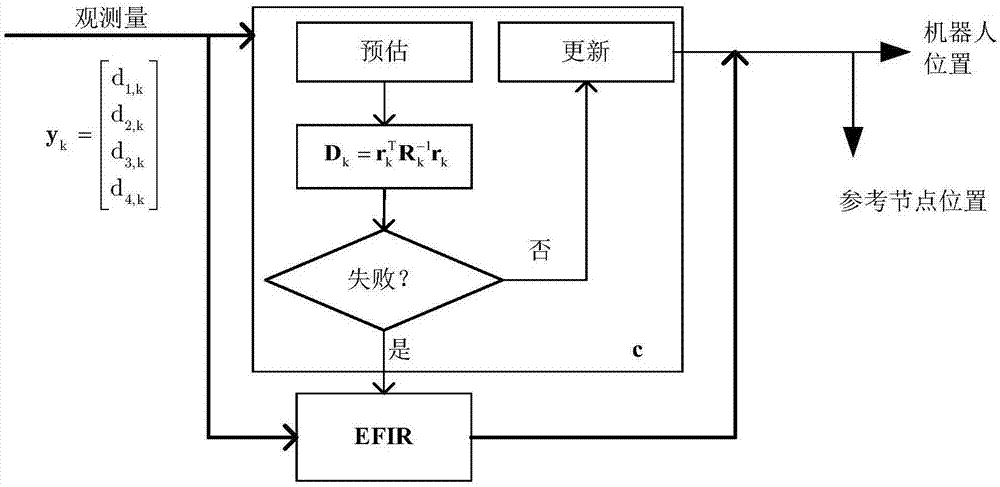
[0068] This embodiment provides an indoor mobile robot positioning method based on EKF / EFIR hybrid filtering, as shown in the schematic diagram figure 1 , the method includes:
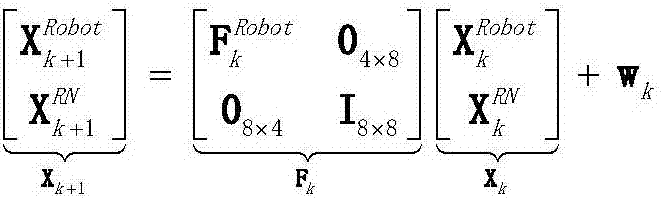
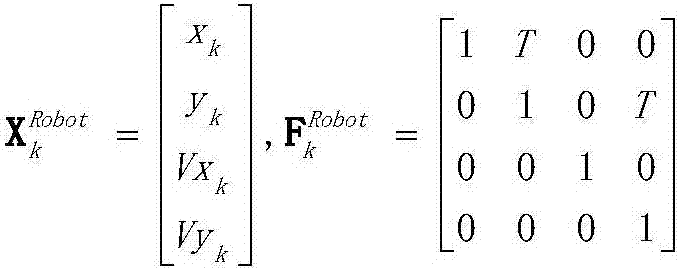
[0069] (1) Take the position and velocity of the target robot in the x and y directions and the positions of each UWB reference node in the x and y directions as the state quantity, and take the distance between the reference node and the positioning tag measured by the UWB positioning tag as the system observation Quantitatively build UWB robot positioning model;
[0070] Among them, the x-direction and y-direction position and speed of the target robot as the state quantity and the initial values of the x-direction and y-direction positions of each UWB reference node are set according to actual needs.
[0071] The position of the reference node can be selected arbitrarily, and the reference node is required to be stationary in this embodiment.
[0072] (2) Based on the UWB robot positioning model...
Embodiment 2
[0129] Based on the method described in Embodiment 1, the present invention also provides an indoor mobile robot positioning device based on EKF / EFIR hybrid filtering, including:
[0130] The UWB robot positioning model building block takes the x-direction and y-direction position and speed of the target robot and the x-direction and y-direction positions of each UWB reference node as the state quantity, and the distance between the reference node and the positioning tag measured by the UWB positioning tag The distance is used as a system observation to construct a UWB robot positioning model;
[0131] Among them, the x-direction and y-direction position and speed of the target robot as the state quantity and the initial values of the x-direction and y-direction positions of each UWB reference node are set according to actual needs.
[0132] The position of the reference node can be selected arbitrarily, and the reference node is required to be stationary in this embodiment....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More