Multi-target positioning outer approximation nearly convex optimization algorithm on basis of arrival time
A multi-target positioning and convex optimization algorithm technology, applied in the field of wireless signal-based positioning, can solve problems such as increased computational complexity and easy to fall into local optimal solutions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0252] base station:
[0253] s=
[0254] 40
[0255] Target to be positioned:
[0256] x =
[0257] 10
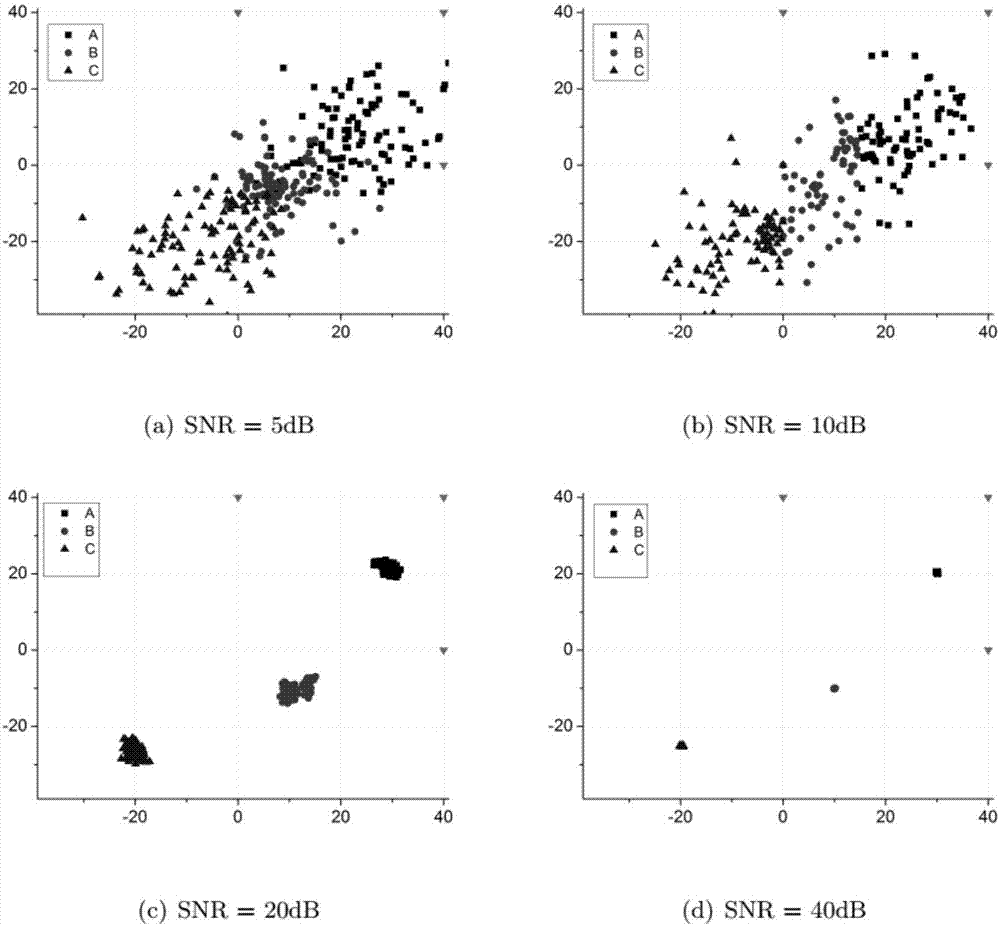
[0258] After 100 Monte Carlo simulations, the calculated target position scatter diagram is attached figure 2 as shown, figure 2 The Monte Carlo simulation results of 3 targets and 8 base stations are shown.
Embodiment 2
[0260] base station:
[0261] s=
[0262] 40
40
-40
-40
40
-40
40
-40
[0263] Target to be positioned:
[0264] x =
[0265] -20
0
20
-20
0
20
-20
0
20
20
20
20
0
0
0
-20
-20
-20
[0266] SNR
[0267] SNR(dB)
10
20
30
40
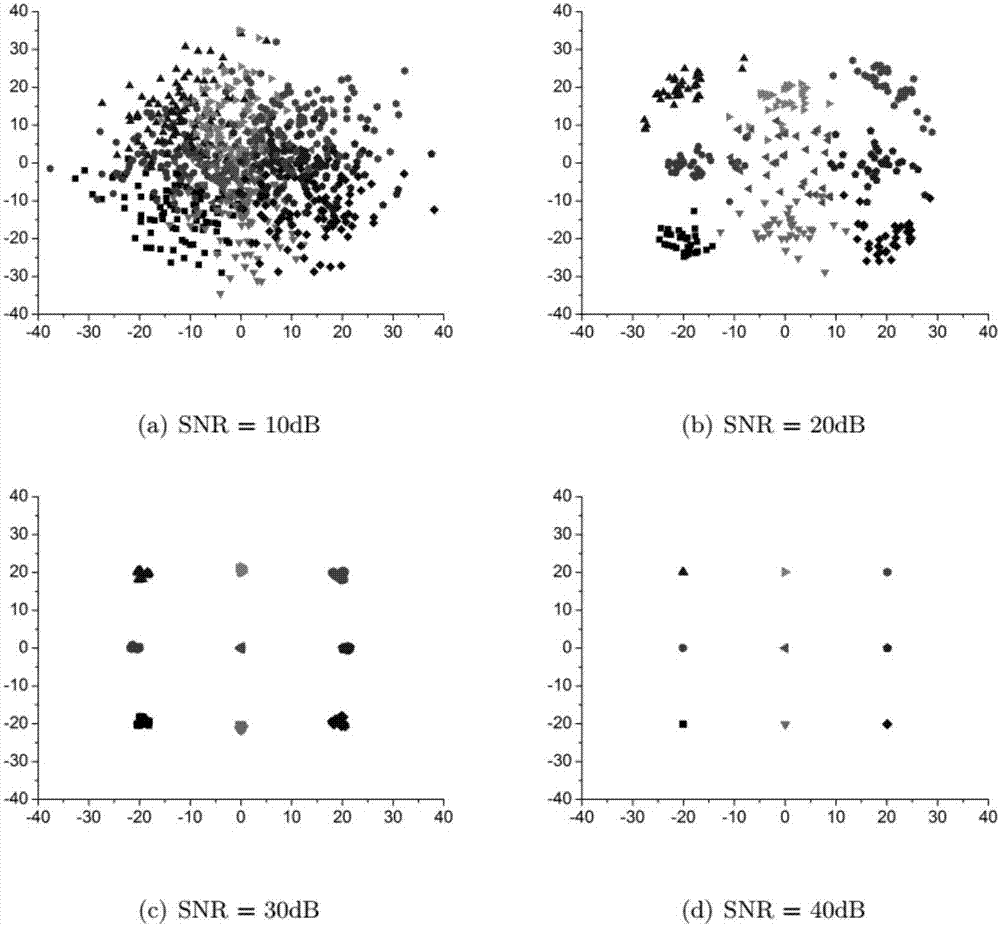
[0268] After 100 Monte Carlo simulations, the calculated target position scatter diagram is attached image 3 as shown, image 3 The Monte Carlo simulation results for 9 targets and 4 base stations are shown.
[0269] Table 1 Multi-target (9) positioning accuracy and computational complexity
[0270]
[0271]
[0272] All numerical experiments were performed on a laptop computer, by the attached figure 2 , 3 It can be seen that the algorithm described in this patent can solve the TOA-MSL positioning problem, and can obtain good numerical results when the signal-to-noise ratio is greater than or equal to 20 dB. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More