

Method and device for acquiring in-situ rotating state of robot
A kind of in-situ rotation, robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of being easily affected by the target, inability to judge, and inaccurate acquisition of robot status.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
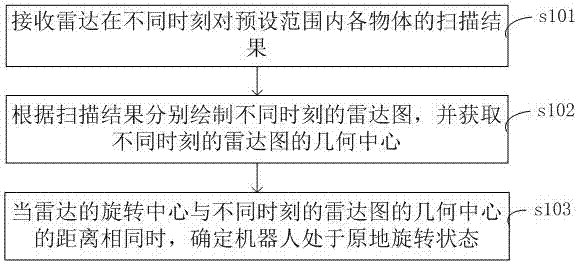
[0041] The method for obtaining the in-situ rotation state of the robot in the embodiment of the present invention is applicable to various robot systems. The robot system is equipped with a radar, and the radar uses a radio method to find the target and measure the spatial position of the target. equipment. The radar emits electromagnetic waves to irradiate the target and receives its echo, thereby obtaining information such as the distance from the target to the electromagnetic wave emission point, the distance change rate (radial velocity), azimuth, and height. The embodiment of the present invention uses the precise ranging function of the radar to accurately obtain the state of the robot.
[0042] figure 1 It is a schematic flow chart of Embodiment 1 of the method for o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More