

Claw-type five-legged wall-climbing robot and locomotive gait method thereof
A wall-climbing robot and claw technology, which is applied in the field of climbing robots, can solve the problems of complex leg structure, not many researches on wall-climbing robots, and complicated manufacturing process of claw feet, so as to achieve the effect of improving crawling stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Describe in detail with reference to the accompanying drawings
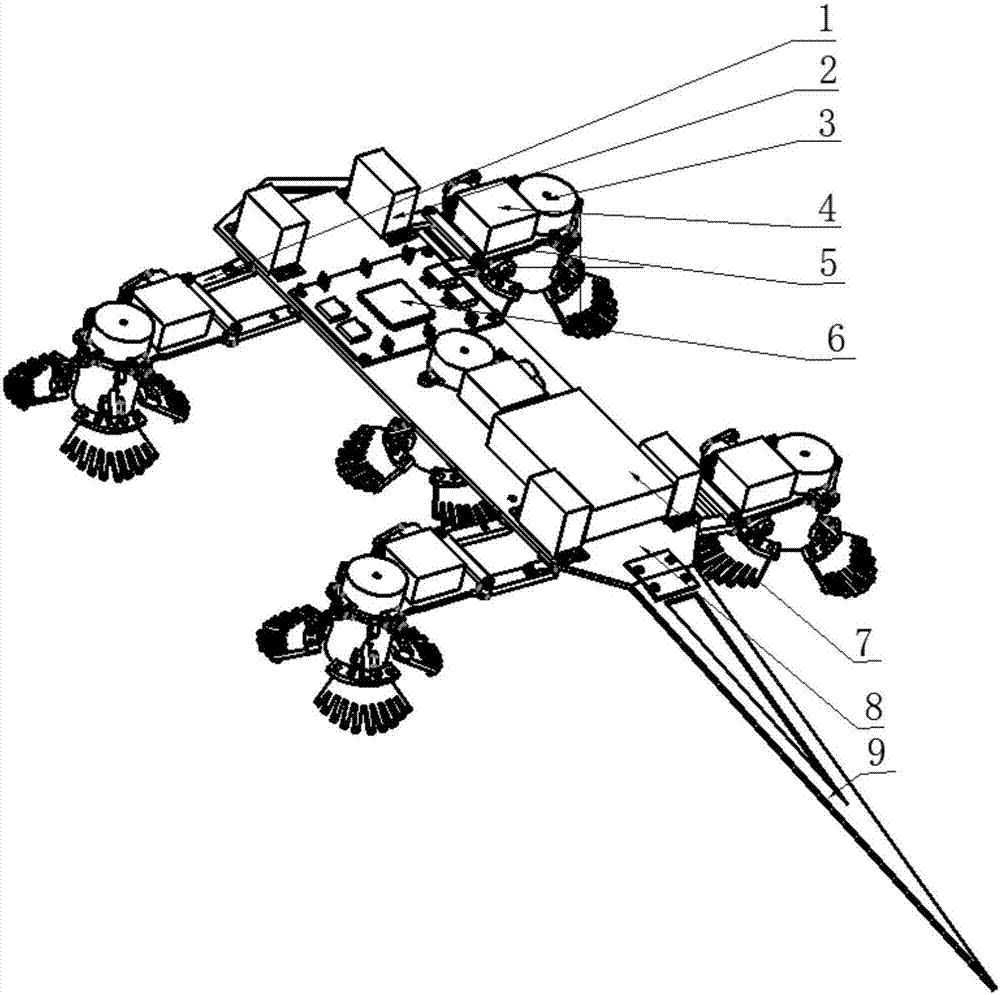
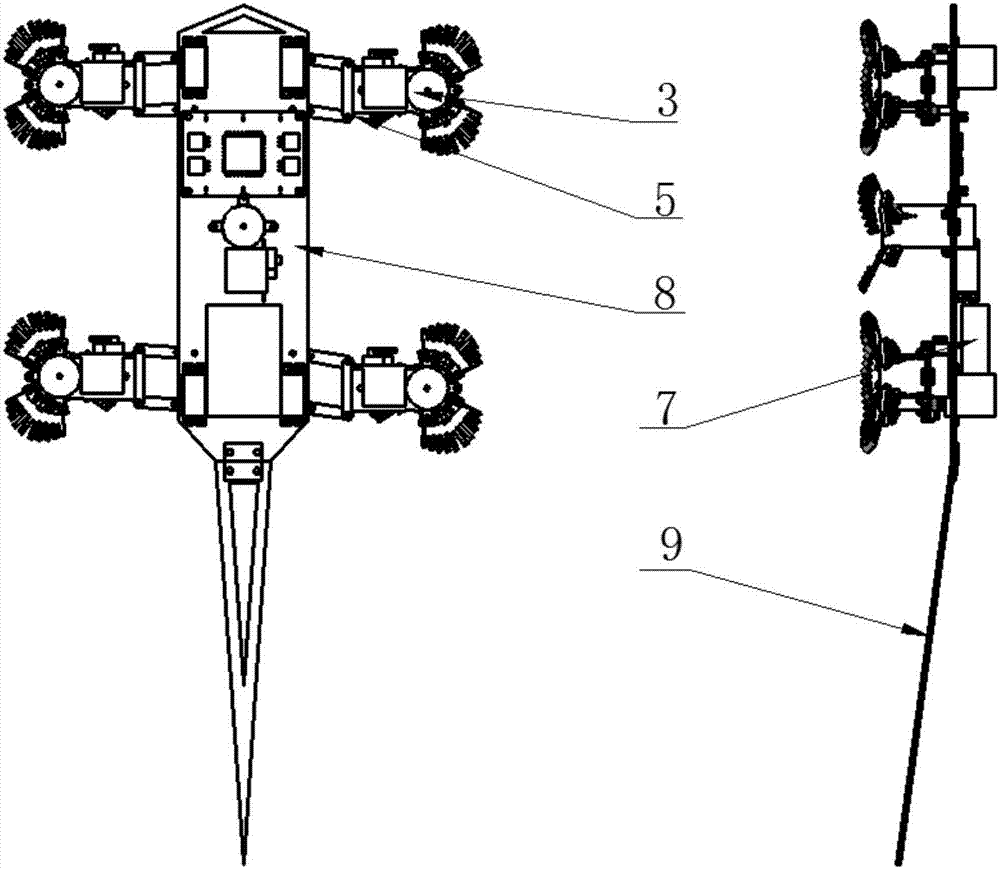
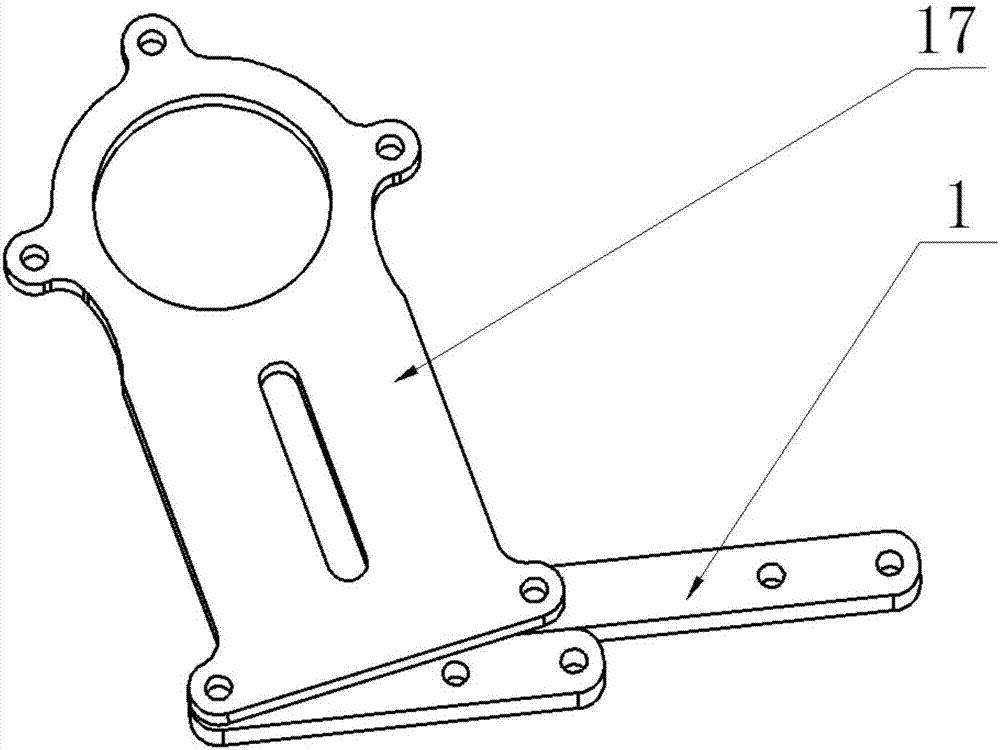
[0014] Such as figure 1 Shown is the specific design drawing of the claw-type five-legged wall-climbing robot. The robot is composed of a fuselage plate 8, a foot structure 3, a steering gear control panel 6, a tail 9, a battery 7, and leg joints 5. The leg joint 5 is made up of the first front rod 1-1 of the leg, the second front rod 1-2 of the leg, the rear rod 17 of the leg, the swing steering gear 2 and the stretch steering gear 4; Connect to the left and right sides on the fuselage board 8. One end of the first front rod 1-1 of the leg is installed on the output shaft of the swing leg steering gear 2 through the rudder disc, and the other end is connected with the rear rod 17 of the leg by a mechanical limiter. The second front rod 1-1 of the leg 2. One end is connected to the fuselage plate 8 by means of a mechanical limit, and the other end is also connected to the leg rear rod 17 by means of a me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More