

Claw type five-legged wall-climbing robot and its motion gait method
A wall-climbing robot and claw technology, applied in the field of climbing robots, can solve the problems of complex leg structure, single climbing environment, and large body size, and achieve the effect of improving climbing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Describe in detail with the attached drawings
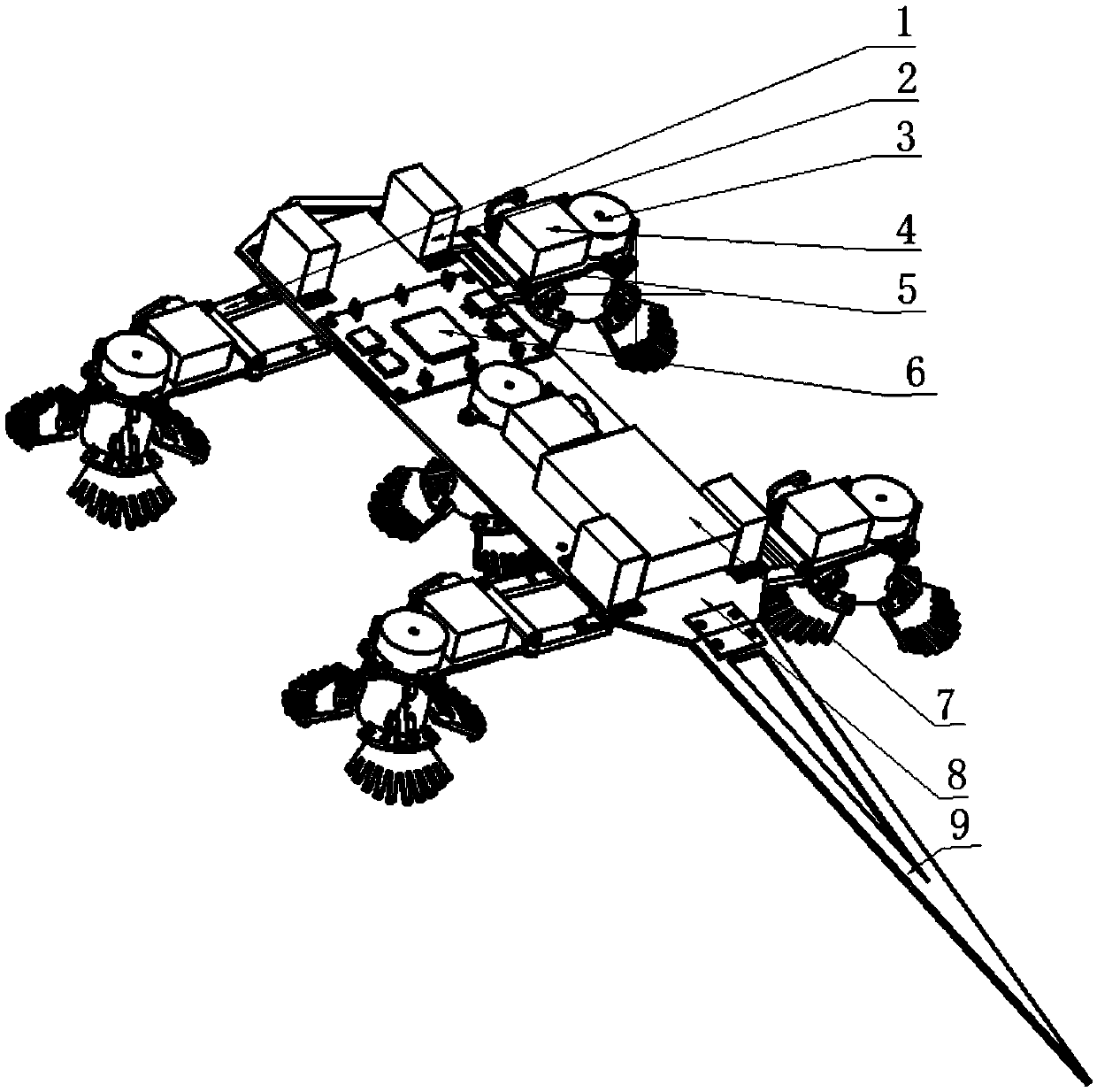
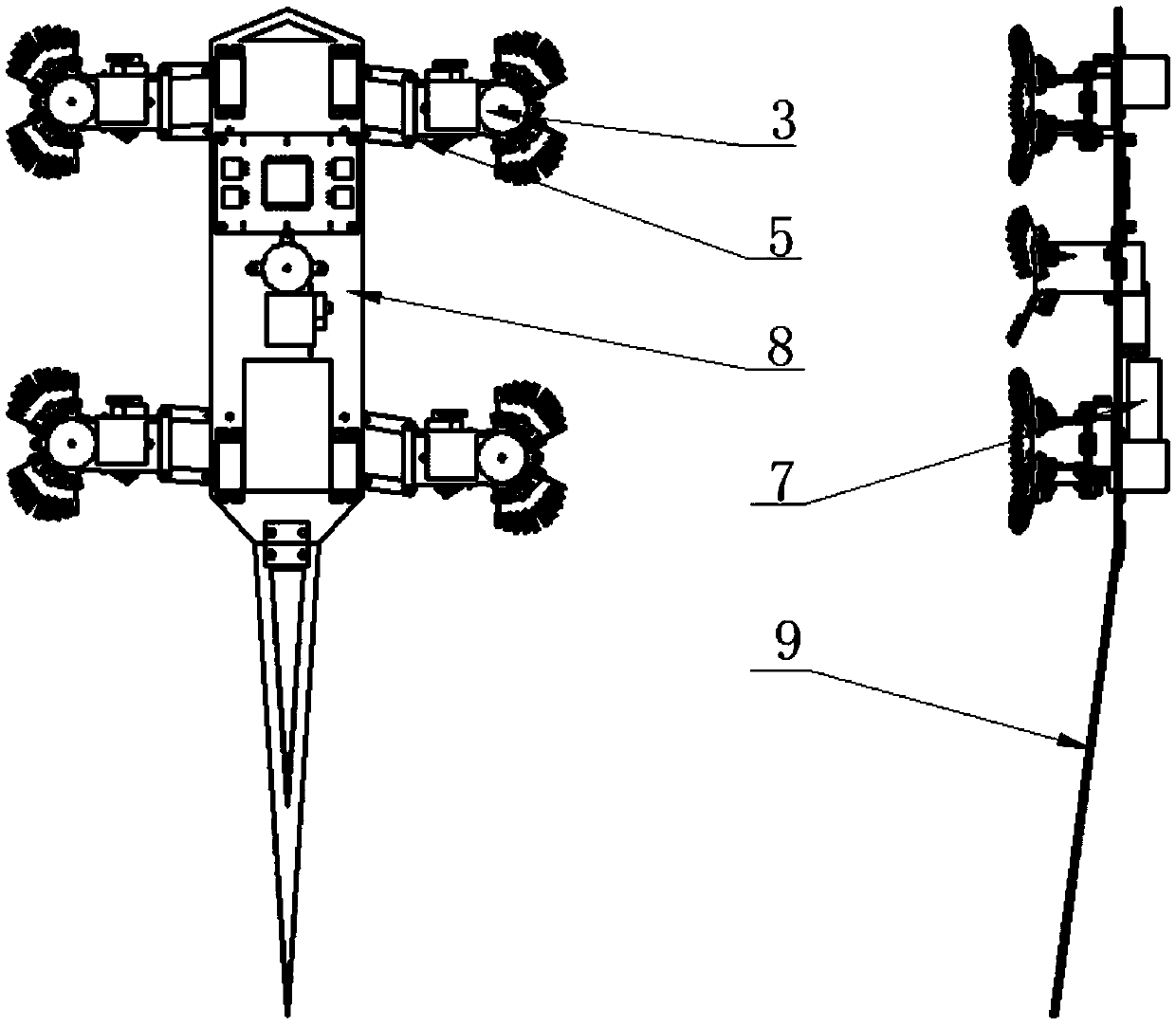
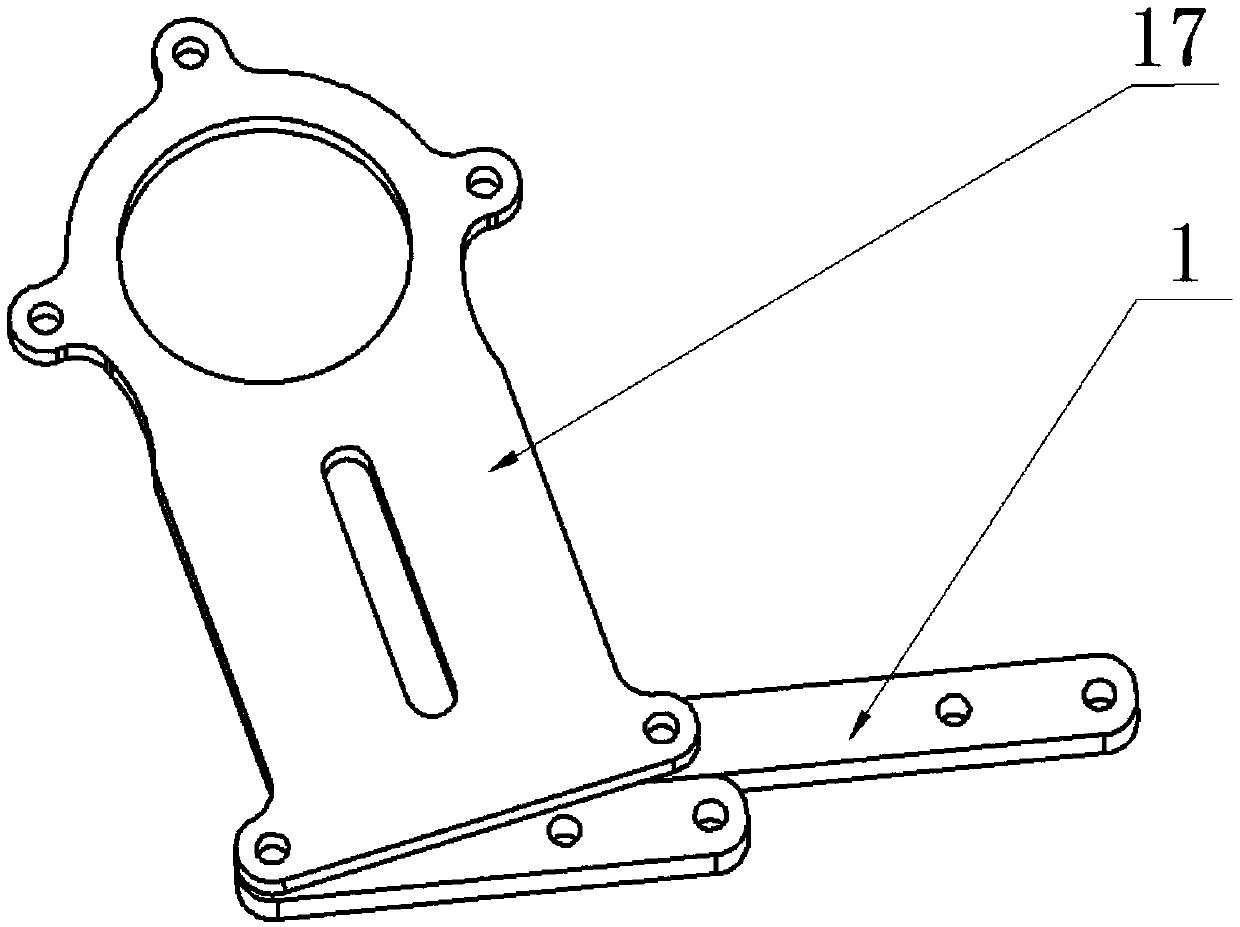
[0014] Such as figure 1 Shown is the specific design drawing of the claw-type five-legged wall-climbing robot. The robot is composed of a fuselage plate 8, a foot structure 3, a steering gear control panel 6, a tail 9, a battery 7, and leg joints 5. The leg joint 5 is composed of the first front rod of the leg, the second front rod of the leg, the rear rod 17 of the leg, the swing leg steering gear 2 and the tension steering gear 4; wherein the swing leg steering gear 2 is glued to the fuselage plate 8 on the left and right sides. One end of the first front rod of the leg is installed on the output shaft of the swing leg servo 2 through the rudder disc, the other end is connected with the rear rod 17 of the leg through a mechanical limiter, and one end of the second front rod of the leg is through a mechanical limiter. The way is connected with the fuselage plate 8, and the other end is also connected with the leg rear r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More