

Robot end executor
A technology of end effectors and robots, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reduced drilling precision and motor idling, and achieve the effect of improving precision and avoiding backlash
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
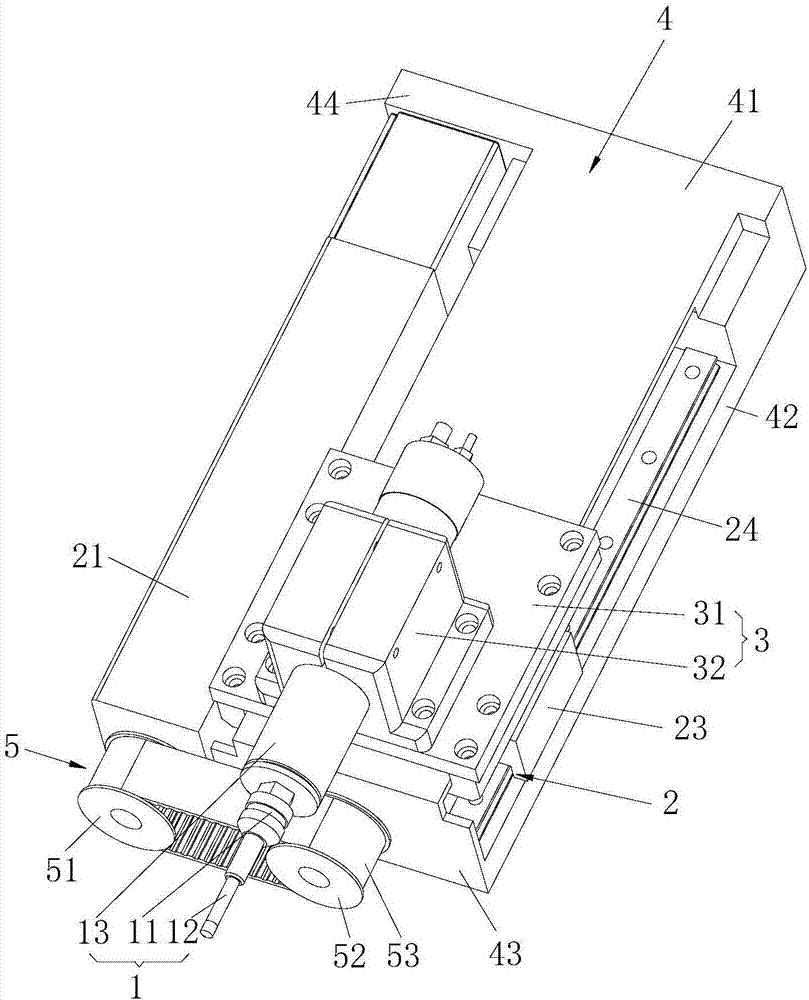
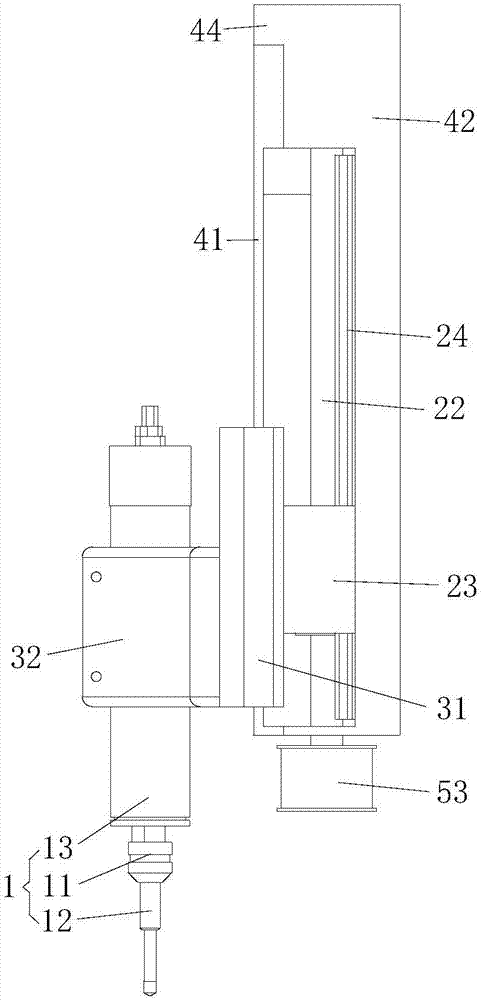
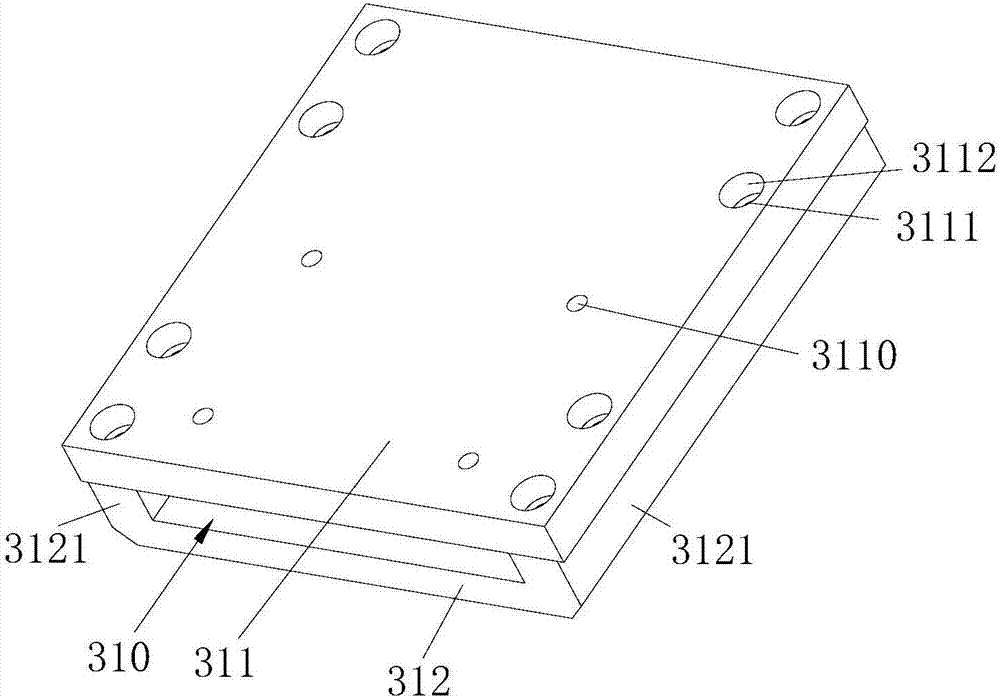
[0030] Furthermore, please also refer to figure 1 and figure 2 , as a specific embodiment of the robot end effector provided by the present invention, the connection assembly 3 further includes a sliding plate 31 fixedly connected to the mounting part 32 and the slider 23 respectively, and the sliding plate 31 is slidably arranged on the casing 4 . The connection assembly 3 is used to connect the main shaft module 1 and the feed module 2, the installation part 32 in the connection assembly 3 is fixedly connected with the main shaft housing 13, the sliding plate 31 and the slider 23 in the connection assembly 3 are fixedly connected, wherein the installation part 32 and The sliding plate 31 is also fixedly connected, so the sliding block 23, the sliding plate 31 and the mounting part 32 move synchronously. The casing 4 is arranged on the outside of the lead screw 22. The sliding connection between the sliding plate 31 and the casing 4 can not only protect the lead screw 22, b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More