

Vehicle self-positioning method, vehicle self-positioning apparatus, equipment and storage medium
A self-positioning and vehicle technology, applied in the direction of measuring devices, satellite radio beacon positioning systems, instruments, etc., can solve the problems of unsatisfactory automatic driving, high price, and poor positioning accuracy, and achieve simple, reliable, low-cost, The effect of meeting the precision requirements and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
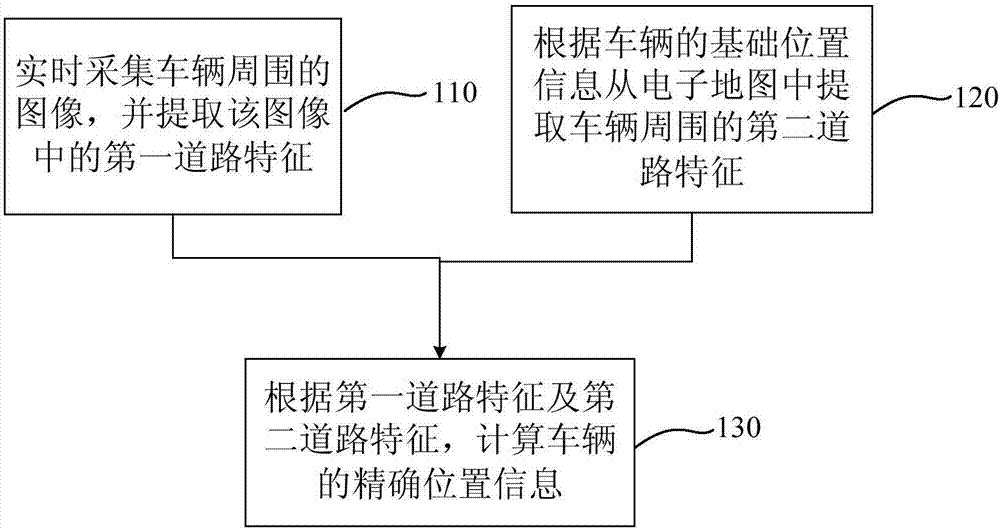
[0029] figure 1 It is a flow chart of the vehicle self-positioning method provided by Embodiment 1 of the present invention. This embodiment is applicable to the self-positioning of the self-driving vehicle. The method can be executed by the vehicle self-positioning device, which can be installed on the self-driving vehicle superior. Such as figure 1 As shown, the method specifically includes the following steps:
[0030] Step 110, collect images around the vehicle in real time, and extract first road features in the images.
[0031] Wherein, the first road feature refers to road surface features and landmarks near the road, etc. Specifically, the first road feature may include at least one of the following: lane lines, road arrows, road prompt text, road shape, signs, signal lights , street lamps, etc. For example, roadway boundary line, turn waiting line, stop line, sidewalk line and other lane lines to remind vehicles to drive, signs with road name, direction, distance,...
Embodiment 2
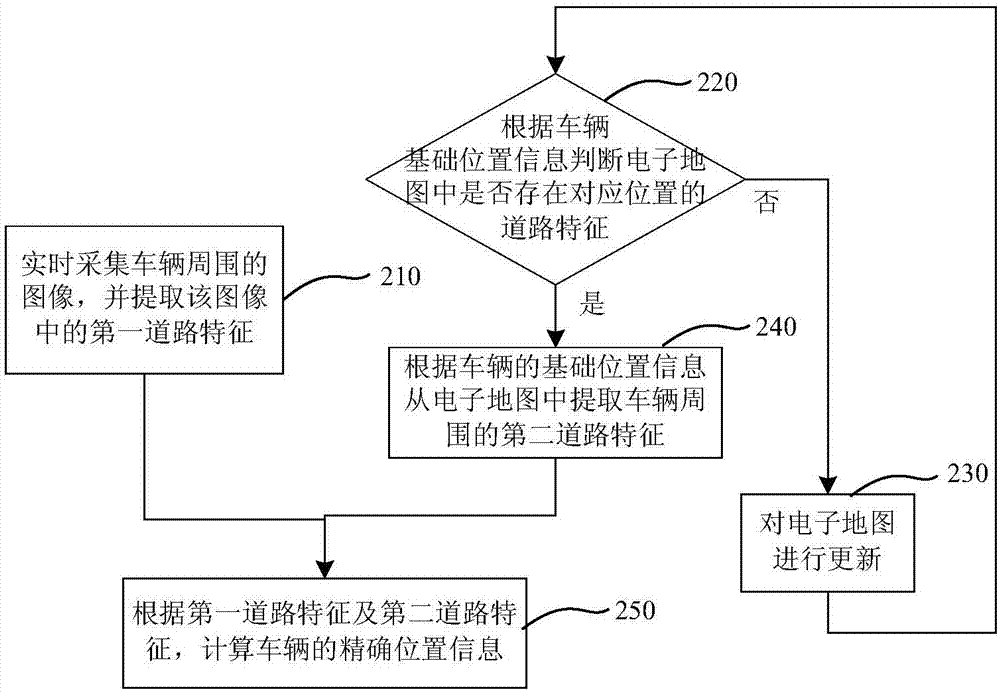
[0043] figure 2 It is a flow chart of the vehicle self-positioning method provided by Embodiment 2 of the present invention. This embodiment adds an electronic map update step on the basis of the above-mentioned Embodiment 1. In this embodiment, the relevant steps in Embodiment 1 are no longer performed. For repeated explanation, please refer to Embodiment 1 for details. Such as figure 2 As shown, the method of the present embodiment includes the following steps:
[0044] Step 210, collect images around the vehicle in real time, and extract first road features in the images.
[0045] Step 220, according to the basic location information of the vehicle, it is judged whether there is a road feature corresponding to the position in the electronic map, if there is no road feature corresponding to the position in the electronic map, then perform step 230; if there is a road feature corresponding to the position in the electronic map, then Execute step 240 .
[0046] Wherein, ...
Embodiment 3
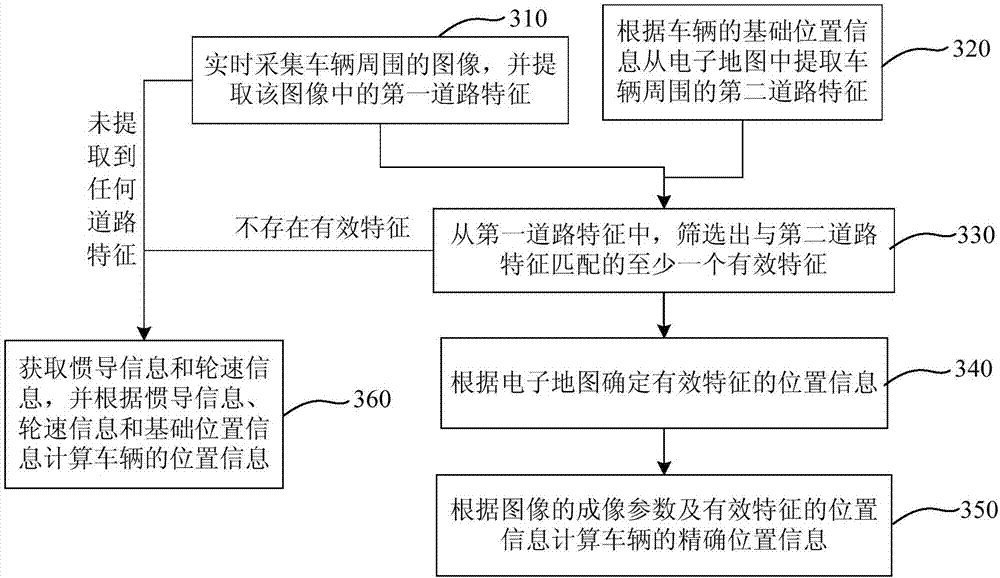
[0056] image 3 It is a flow chart of the vehicle self-positioning method provided in the third embodiment of the present invention, which is realized on the basis of the first embodiment. Such as image 3 As shown, the method includes the following steps:
[0057] Step 310, collect images around the vehicle in real time, and extract first road features in the images. If there is no road feature in the image, that is, no road feature is extracted in the image, step 360 is performed. If the road features are extracted, go to step 330 .
[0058] Step 320, extracting second road features around the vehicle from the electronic map according to the basic location information of the vehicle.
[0059] Step 330, filter out at least one valid feature matching the second road feature from the first road feature. If there is no valid feature matching the second road feature in the first road feature, step 360 is performed. If there are matching valid features, step 340 is performed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More