

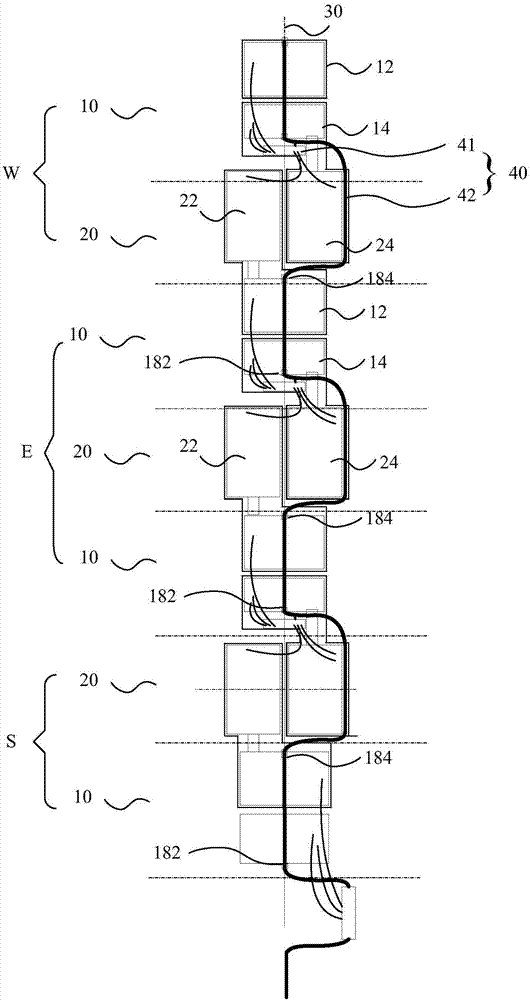
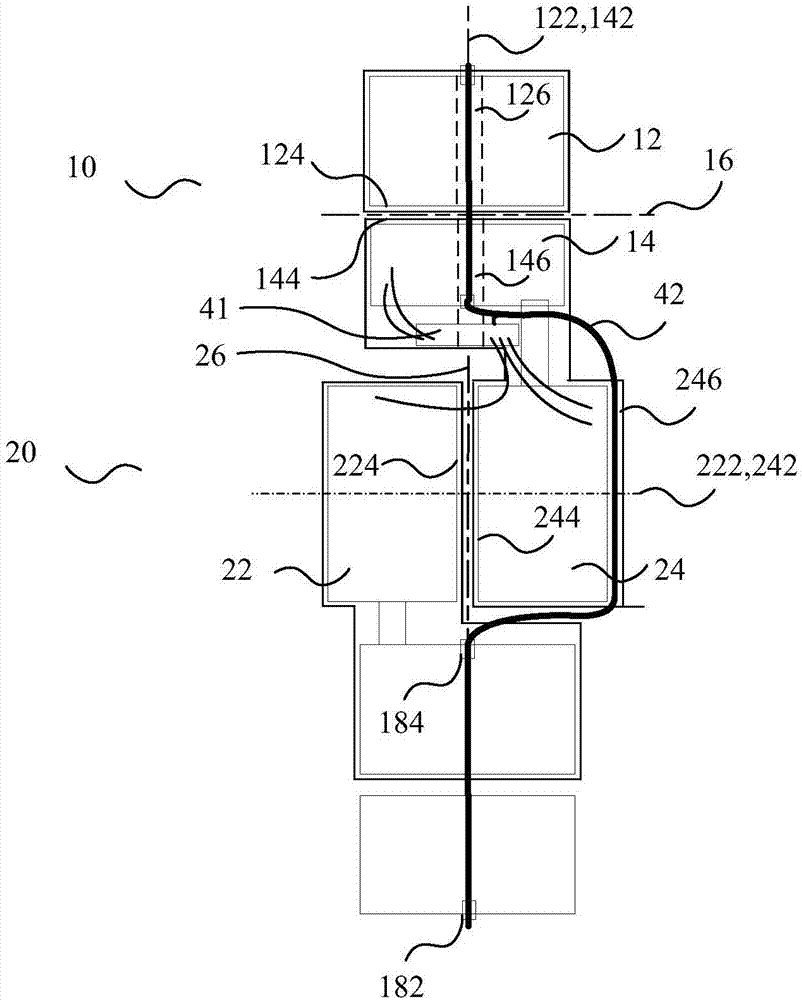
Multi-joint mechanical arm
A technology of multi-joint manipulator and manipulator, which is applied to manipulators, program-controlled manipulators, joints, etc., can solve the problems of restricting the operating range and operating angle of manipulators, and achieve the effect of improving operation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
[0025] In this article, "first", "second", etc. are only used to distinguish each other, not to indicate the degree of importance and order, or the prerequisite for mutual existence.
[0026] Herein, "equal", "identical" and the like are not strictly restricted in the sense of mathematics and / or geometry, but also include errors understandable by those skilled in the art and allowed in manufacture or use. Unless otherwise stated, a numerical range herein includes not only the entire range within its two endpoints, but also several subranges subsumed therein.
[0027] In order to solve the problem of limiting the operating range and operating angle of the robotic arm due to the angle between the joints in the prior art, the present invention provides a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More