

Docking and positioning calibration method based on AGV and AGV
A small car, real-time positioning technology, applied in motor vehicles, measuring devices, instruments, etc., can solve the problems of low accuracy and deviation in picking and placing goods or materials
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
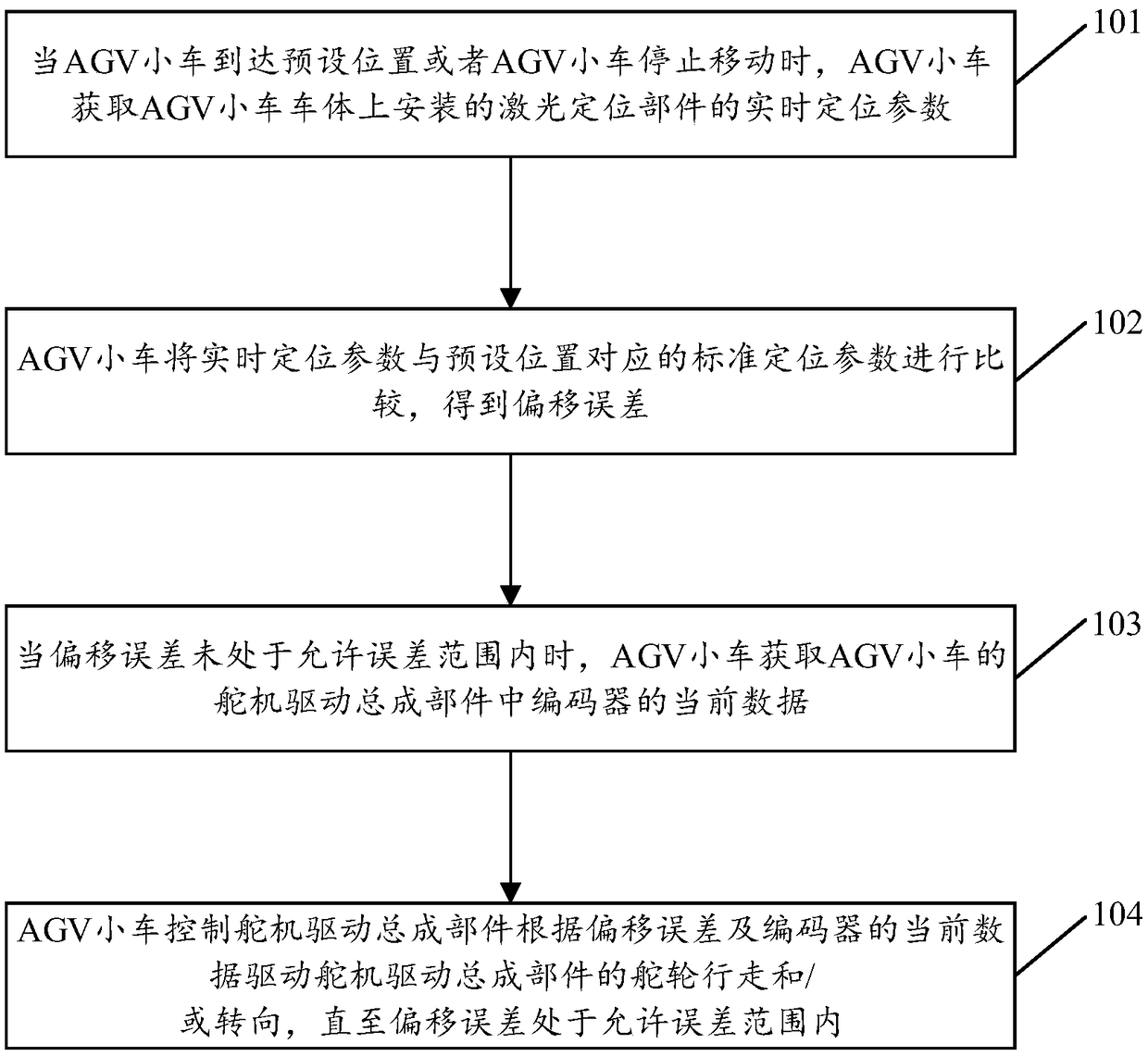
[0070] see figure 1 , figure 1 It is a schematic flowchart of an AGV-based docking positioning calibration method disclosed in an embodiment of the present invention. Such as figure 1 As shown, the docking positioning calibration method based on the AGV car can include the following steps:
[0071] 101. When the AGV car reaches the preset position or the AGV car stops moving, the AGV car obtains the real-time positioning parameters of the laser positioning components installed on the AGV car body.
[0072] In the embodiment of the present invention, the preset position can be a preset shelf position, and when the AGV trolley reaches the shelf position, it can perform the operation of picking and placing goods; when the AGV trolley reaches the shelf position, the AGV trolley automatically stops moving.
[0073] As an optional implementation manner, before performing step 101, the following steps may also be performed:
[0074] The AGV car uses the RFID reader installed on t...
Embodiment 2
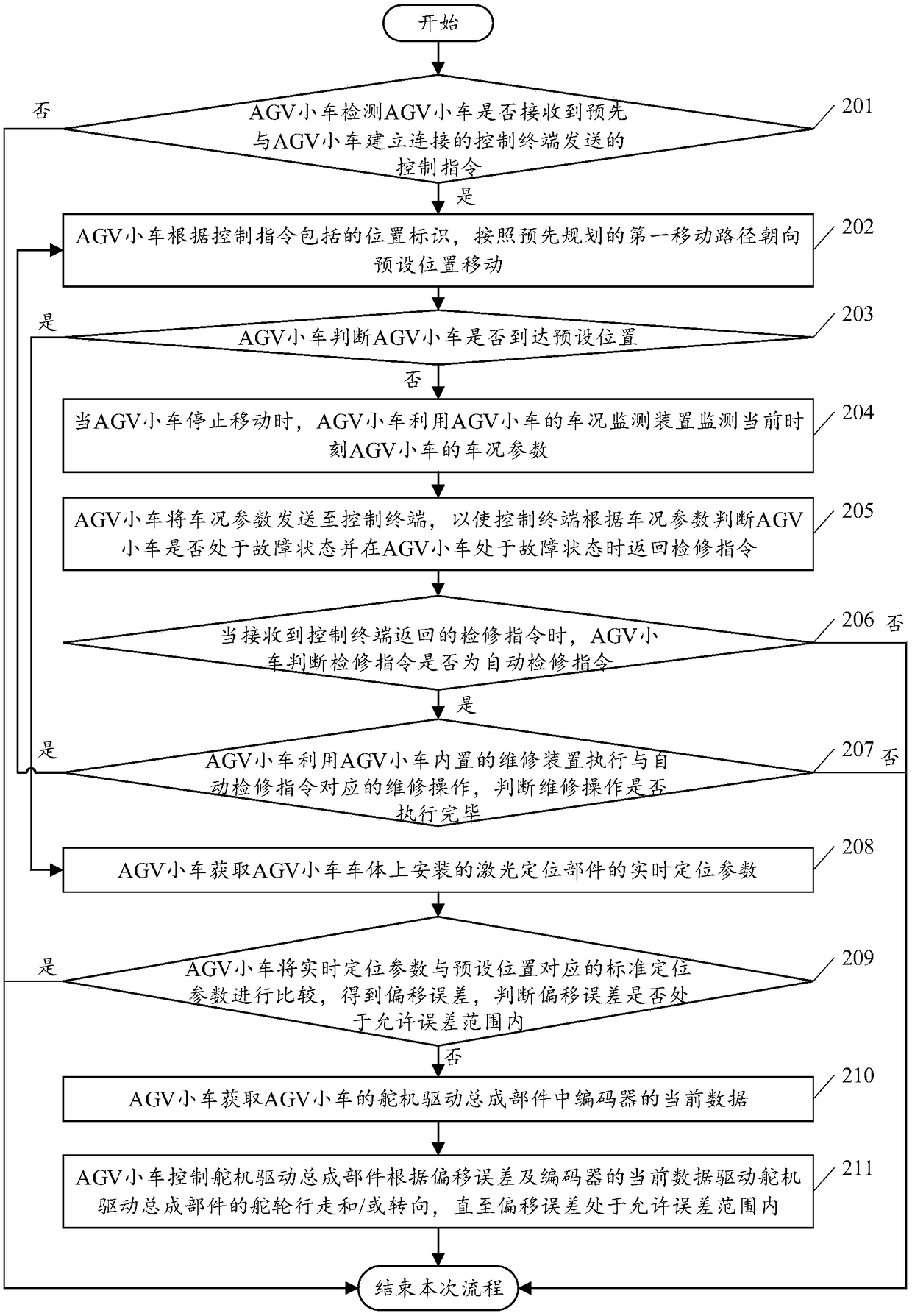
[0097] see figure 2 , figure 2 It is a schematic flowchart of another AGV-based docking positioning calibration method disclosed in the embodiment of the present invention. Such as figure 2 As shown, the docking positioning calibration method based on the AGV car can include the following steps:
[0098] 201. The AGV detects whether the AGV has received the control command sent by the control terminal that has previously established a connection with the AGV. If yes, execute steps 202 to 203. If not, end this process.
[0099] In the embodiment of the present invention, the control instruction at least includes a position identification of a preset position and a preset operation, and the preset operation includes a material fetching operation or a material putting operation.
[0100] In the embodiment of the present invention, the movement of the AGV car can be controlled through the control terminal that has established a connection with the AGV car in advance, wherein...
Embodiment 3
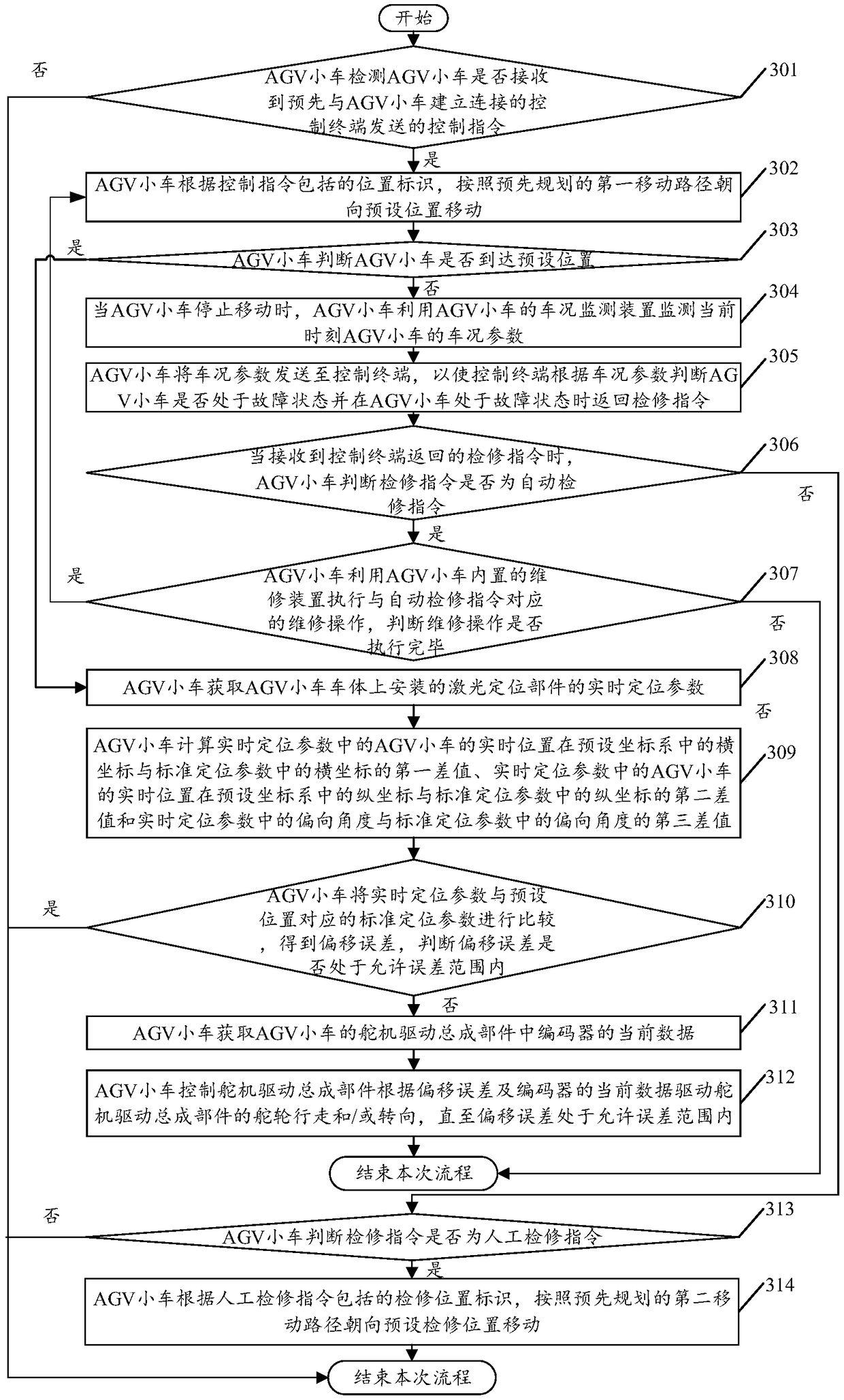
[0130] see image 3 , image 3 It is a schematic flowchart of another AGV-based docking positioning calibration method disclosed in the embodiment of the present invention. Such as image 3 As shown, the docking positioning calibration method based on the AGV car can include the following steps:
[0131] 301. The AGV detects whether the AGV has received the control command sent by the control terminal that has established a connection with the AGV in advance. If yes, execute steps 302 to 303. If not, end this process.
[0132] In the embodiment of the present invention, the control instruction at least includes a position identification of a preset position and a preset operation, and the preset operation includes a material fetching operation or a material putting operation.
[0133] 302. The AGV moves toward a preset position according to a pre-planned first movement path according to the position identifier included in the control instruction.
[0134] 303 . The AGV jud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More