

Mobile robots and control method and device for same
A mobile robot and control method technology, which is applied in the directions of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems that robots cannot judge and adjust, control methods are complicated, and task execution efficiency is reduced, so as to improve collaboration efficiency, The effect of rationally allocating resources and completing tasks quickly and efficiently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and effect of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
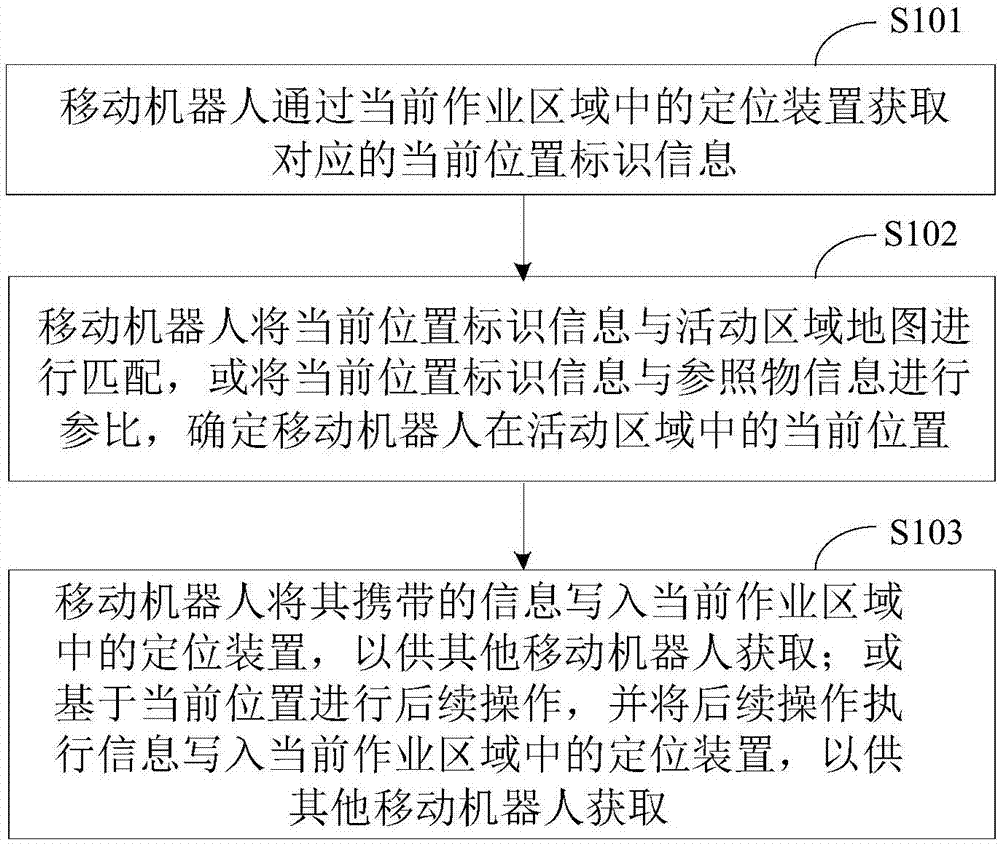
[0019] see figure 1 , figure 1 It is a schematic flowchart of an embodiment of the mobile robot control method of the present invention. In this embodiment, the control method includes the following steps:
[0020] S101: The mobile robot obtains the corresponding current location identification information through the positioning device in the current working area.
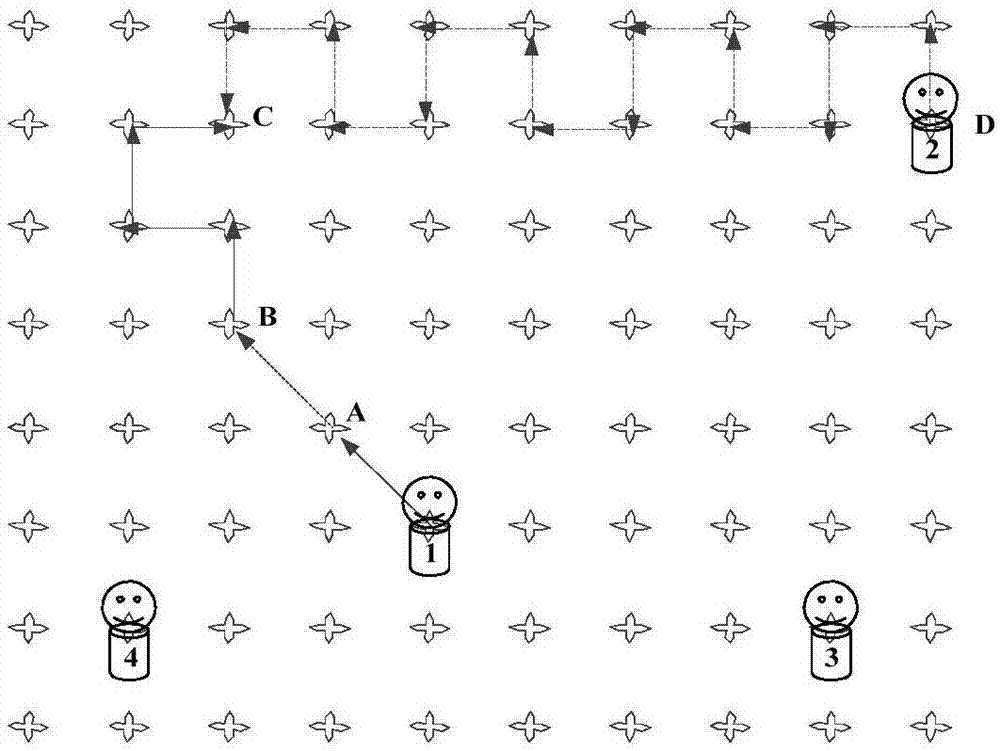
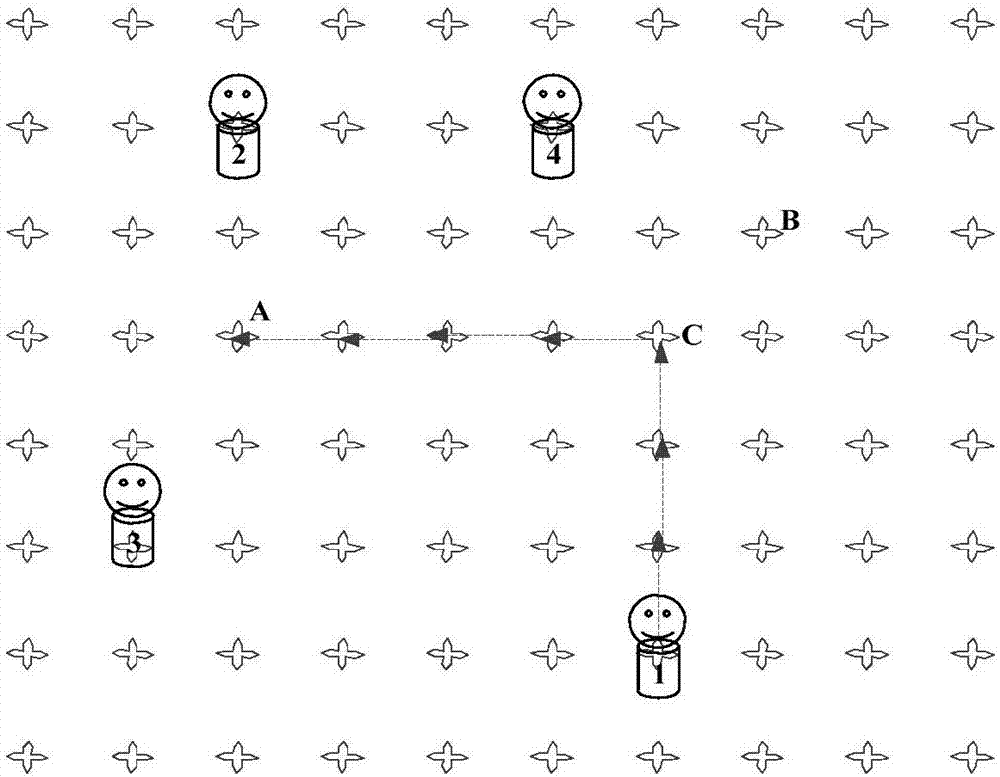
[0021] Specifically, the positioning devices are arranged on the ground of the mobile robot's activity area; the positioning devices can be arranged regularly according to a preset spacing or a preset layout, for example, the positioning devices are arranged in a matrix, triangular arrangement or according to a specific pattern; Positioning devices can also be arranged random...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More