

A Compensation Method for Robot End Position
A technology of end position and compensation method, applied in the direction of instruments, simulators, computer control, etc., can solve the problems of poor data statistics and calculation accuracy, reduced work accuracy, complicated calculation process, etc., to achieve good versatility, improve accuracy and The effect of error compensation operation efficiency and high degree of operation automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
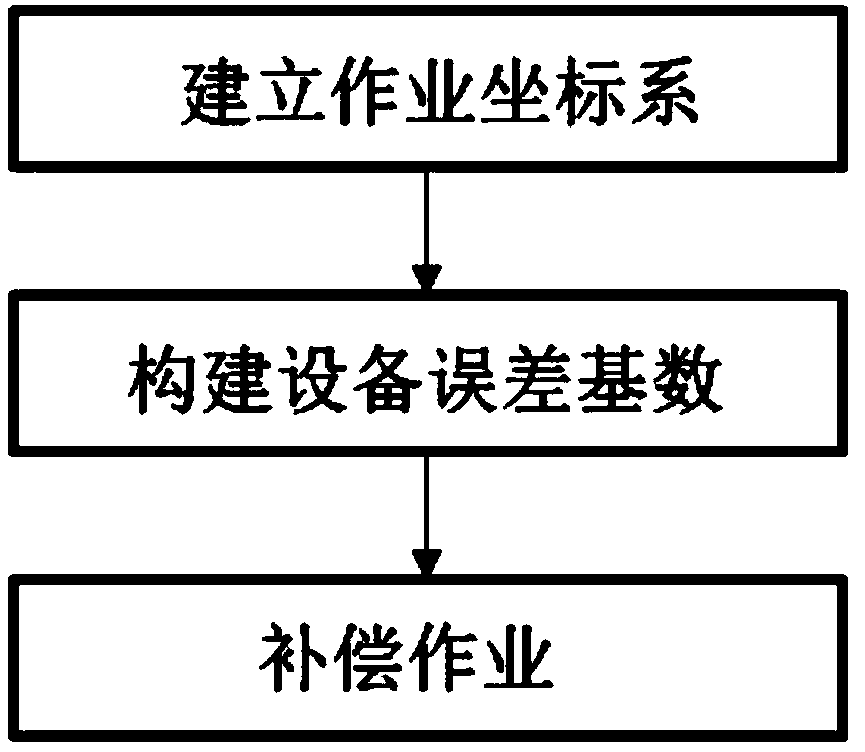
[0013] Such as figure 1 Shown, a kind of robot end position compensation method is characterized in that, described robot end position compensation method comprises the following steps:
[0014] The first step is to establish a work coordinate system. Before the robot runs, according to the robot’s running trajectory, first establish a three-dimensional coordinate system of the robot’s end running trajectory with the position of the robot’s working end equipment in the state of stop and reset as the origin, and embed the robot’s end running trajectory into In the coordinate system, construct several control nodes along the running track;
[0015] The second step is to construct the equipment error base. After the first step is completed, the time parameter is introduced into the three-dimensional coordinate system of the robot end trajectory, and the specific time value when the robot end passes through each control node according to its operation trajectory is calculated. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More