

Comprehensive moving household window wiping robot based on non-contact permanent magnetic adsorption
A technology of omnidirectional movement and permanent magnet adsorption, applied in the field of robotics, can solve the problems of low efficiency, the water tank does not have a circulation loop, and no instructions or reports are found, so as to achieve the effect of improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
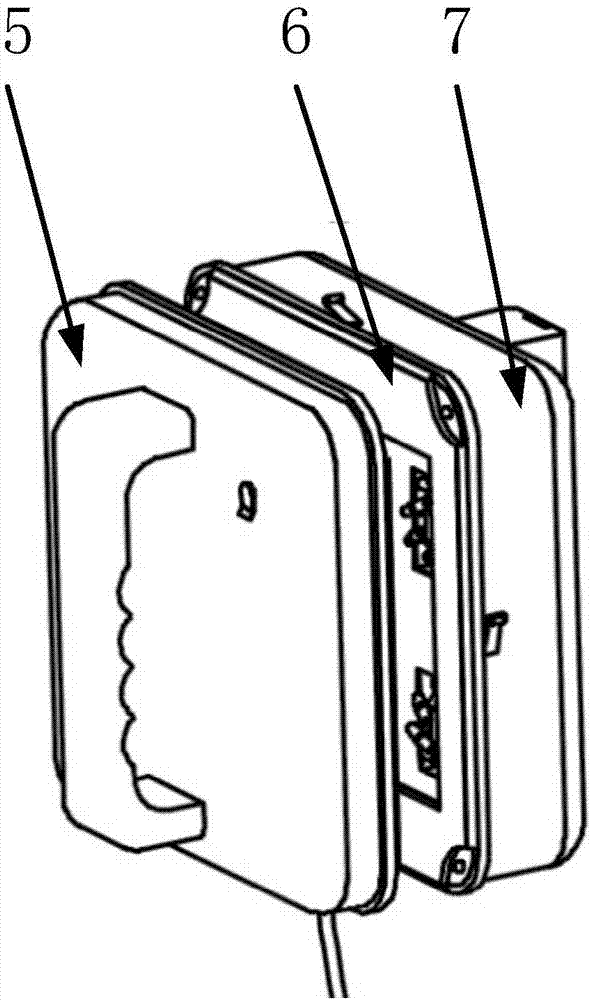
[0049] This embodiment provides an all-round mobile household window-cleaning robot based on non-contact permanent magnetic adsorption, including an inner unit of the window-cleaning robot and an outer unit of the window-cleaning robot; wherein:
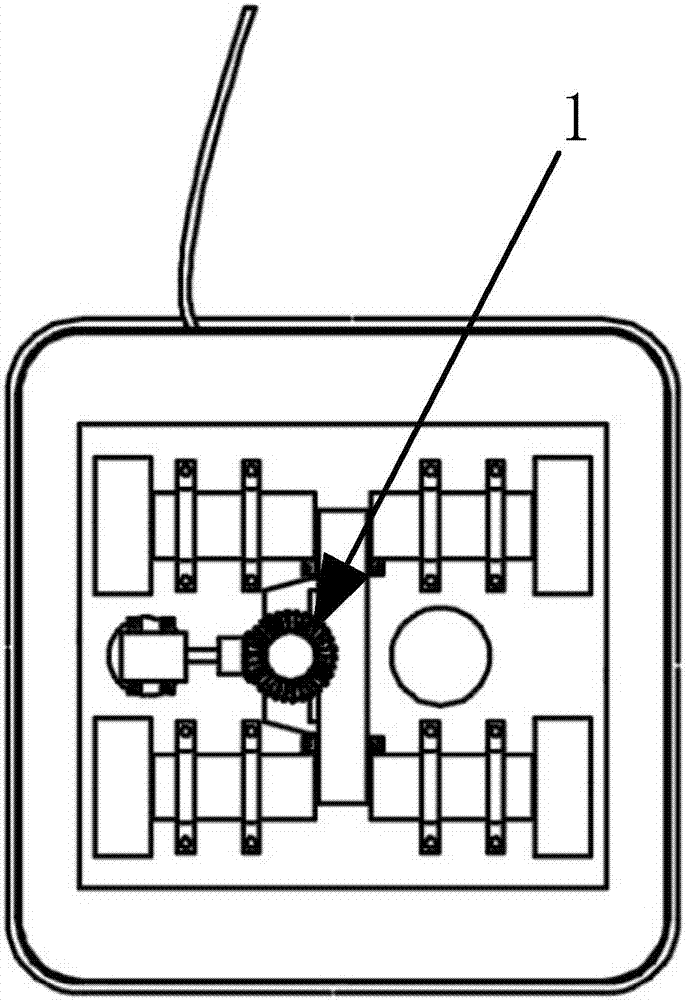
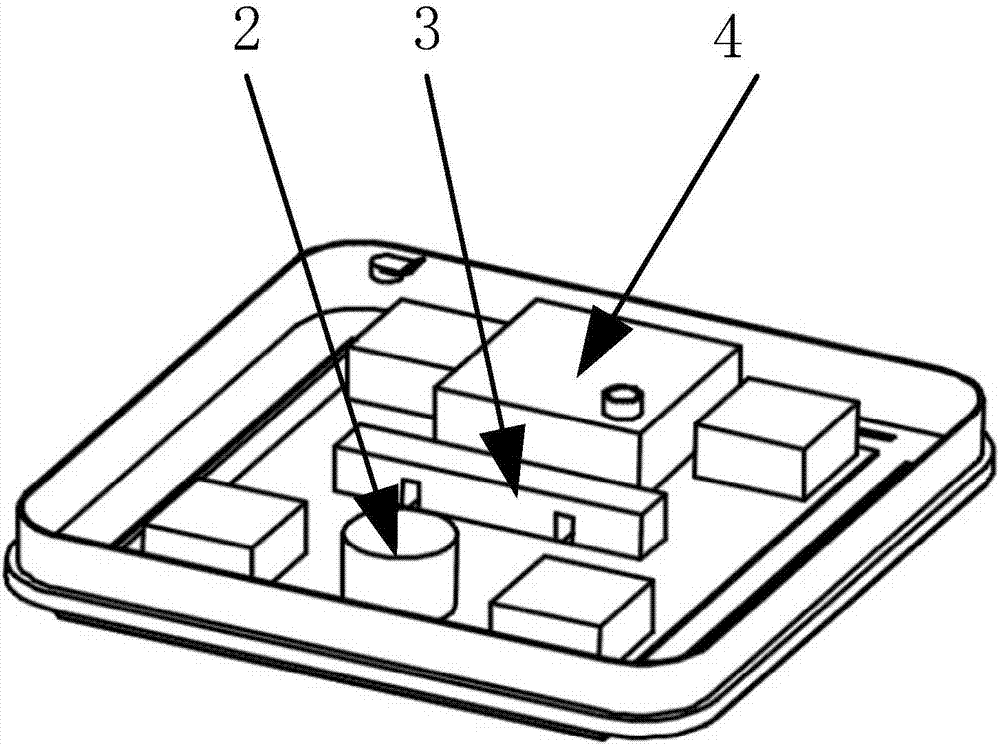
[0050] The window-cleaning robot inner unit includes: an inner unit casing, a power module, a motor, a driving wheel, a permanent magnet of the inner unit, and a screw lifting mechanism; the driving wheel is arranged at the bottom of the inner casing, and the screw lifting mechanism They are respectively connected with the permanent magnets of the inner machine and the motor; the permanent magnets of the inner machine, the power module and the motor are respectively arranged inside the shell of the inner machine, the power module is connected with the motor, and the motor drives the driving wheel to move in all directions ;
[0051]The window-cleaning robot outer machine includes: an outer machine shell, an outer machine permanent ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More