

Adaptive crawler traveling system and adaptive tracked robot
An adaptive walking system technology, applied in the field of robotics, can solve problems such as limited application range, difficult to configure suspension, complex mechanism, etc., and achieve the effect of simple structure, strong adaptive ability, and improved passing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
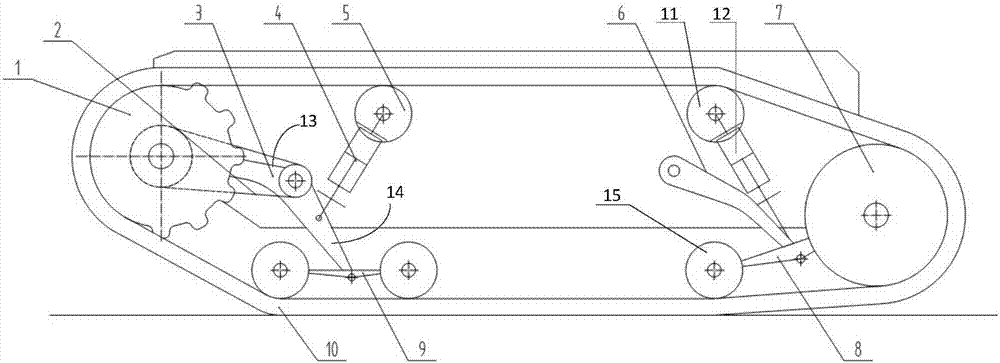
[0028] The present invention will be described with preferred embodiments and viewpoints to explain the structure of the present invention, which is only used to illustrate but not to limit the scope of patent application of the present invention. Therefore, except for the preferred embodiments in the description, the present invention can also be Widely practiced in other embodiments. It should be noted that, in figure 1 Among them, in the description given below of the present invention, the two ends of the features are represented by the first and second ends, such as the first and second ends of the rear swing arm 6 represent the two ends of the rear swing arm 6 .
[0029] like figure 1 As shown, the adaptive crawler robot of the present invention includes an adaptive crawler walking system and a robot fuselage, and the robot fus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More