CT image-based lung lobe segmentation method and device
A technology of CT images and lung lobes, which is applied in the field of image processing, can solve problems such as no lung lobes segmentation, and achieve the effect of saving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
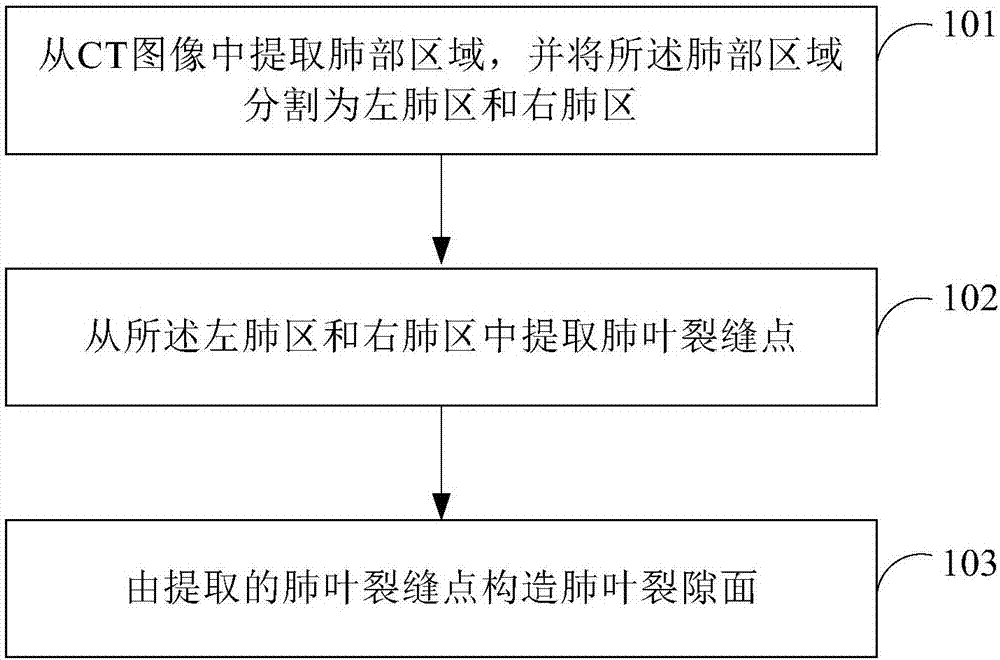
[0067] see figure 1 , which is a flow chart of Embodiment 1 of the method for segmenting lung lobes based on CT images provided by the present invention.
[0068] The method for the segmentation of lung lobes based on CT images provided in this embodiment comprises the following steps:
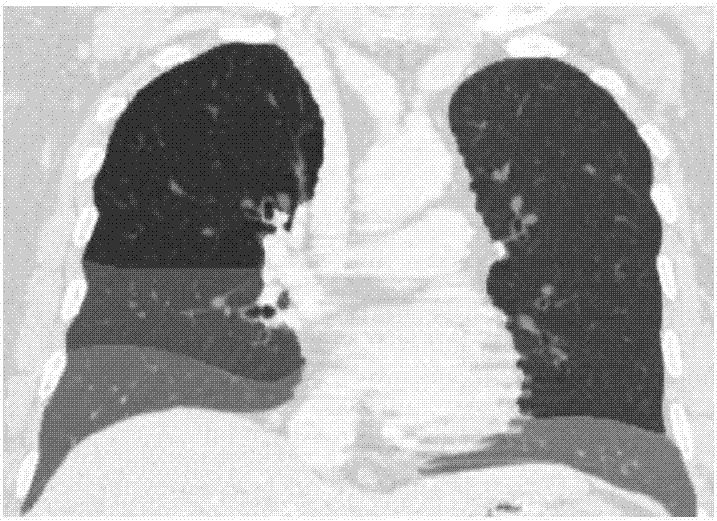
[0069] Step 101: extract a lung area from a CT image, and segment the lung area into a left lung area and a right lung area.
[0070] It should be noted that, generally, when taking a CT image of the lungs, the image of the chest is directly taken. Therefore, it is necessary to extract the lung area from the chest CT image and determine the boundary between the left lung area and the right lung area. After determining the area to which the left and right lungs belong, the lung lobe segmentation can be performed in the left lung area and the right lung area. Generally, the image of the lung area extracted from the CT image, such as figure 2 shown. The left lung area includes 2 lobes, and th...
Embodiment 2
[0077] The initial location of each lobe is connected to a bronchi. In accordance with this physiological characteristic, this embodiment divides the airway into two levels, the first level is the trachea, and the second level is the bronchi. The end of the bronchi is used to find the initial position of each lung lobe. The following describes the lung trachea in the CT image Segmentation is performed to determine the initial location of the lung lobes.
[0078] see Figure 6 , which is a flow chart of Embodiment 2 of the method for segmenting lung lobes based on CT images provided by the present invention.
[0079] The method for lung lobe segmentation provided in this embodiment includes:
[0080] Step 201: Extract lung regions from CT images.
[0081] Step 202: Segment the lung region into a left lung region and a right lung region.
[0082] Step 203: Segment the trachea and bronchi from the CT image of the lung region.
[0083] Step 202 and step 203 have no sequence r...
Embodiment 3
[0095] Since there are many image points in the acquired CT image, some of the image points may be interference points caused by certain factors in the process of obtaining the CT image, and some points may be points on other organs of the human body. Such as crack local bright spot, vessel wall signal point, etc. These image points mentioned above will all produce interference during the process of extracting the fissure points of the lung lobe. Therefore, in order to extract the fissure points of the lung lobe more accurately, these interference points need to be suppressed.
[0096] see Figure 7 , which is a flow chart of Embodiment 3 of the method for segmenting lung lobes based on CT images provided by the present invention.
[0097] The method for segmenting lung lobes based on CT images provided in this embodiment includes:
[0098] Step 301: extract a lung area from a CT image, and segment the lung area into a left lung area and a right lung area.
[0099] Step 302...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com