

Wall climbing spraying robot based on mechanical arm
A technology of spraying robots and mechanical arms, which is applied in the direction of manipulators and manufacturing tools, which can solve the problems that the spraying effect is easily disturbed by human factors, the quality of the paint surface is different, and the labor intensity is high.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
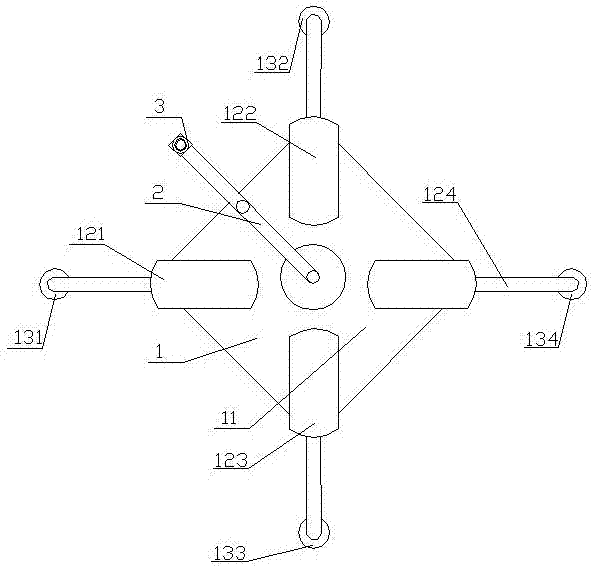
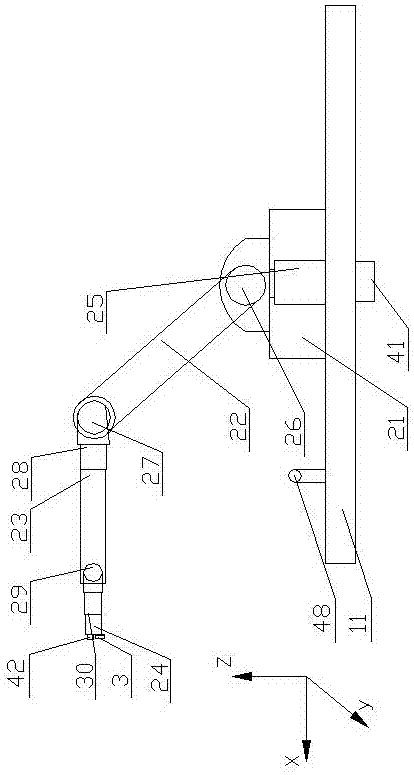
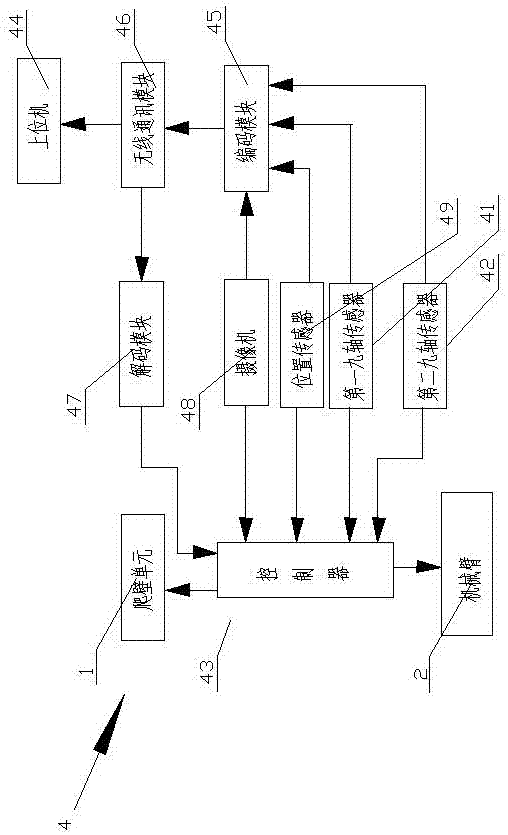
[0030] Such as figure 1 , 2 , 3, the present invention includes a climbing unit 1, a mechanical arm 2, a paint nozzle 3 and a control system 4.
[0031] The wall climbing unit 1 comprises a chassis 11, and the four corners of the chassis 11 are equipped with a first electric push rod 121, a second electric push rod 122, a third electric push rod 123 and a fourth electric push rod 124 arranged diagonally. The output end of the push rod 121 is connected with the first electromagnet 131, the output end of the second electric push rod 122 is connected with the second electromagnet 132, the output end of the third electric push rod 123 is connected with the third electromagnet 133, and the fourth electric push rod 123 is connected with the third electromagnet 133. The output end of the electric push rod 124 is connected with a fourth electromagnet 134 .
[0032] How crawling unit 1 works:
[0033] When moving up vertically, the first electromagnet 131 and the fourth electromagne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More