

Method for on-line compensation of positioning error of a robot assisted by external measurement
A compensation method and robot technology, applied in the field of robots, can solve problems such as time-consuming installation and debugging, sensor position and signal interference, and achieve the effect of being convenient for industrial field application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings. Here, the exemplary embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
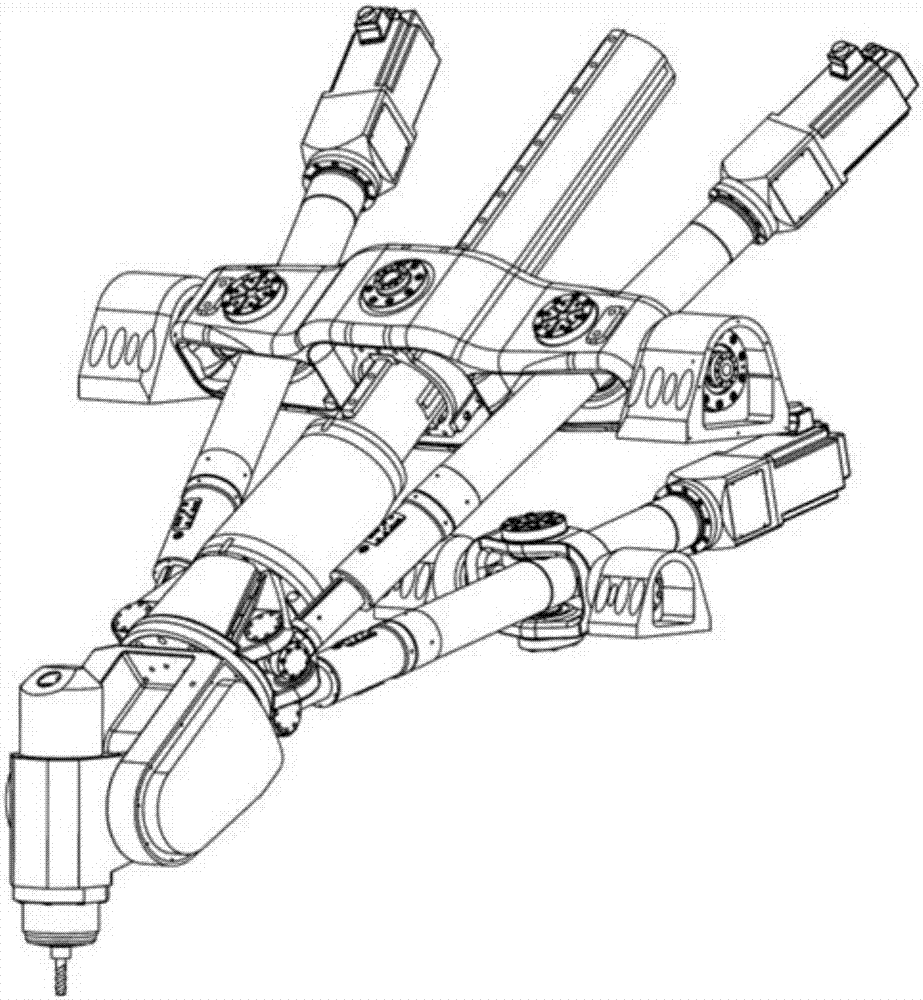
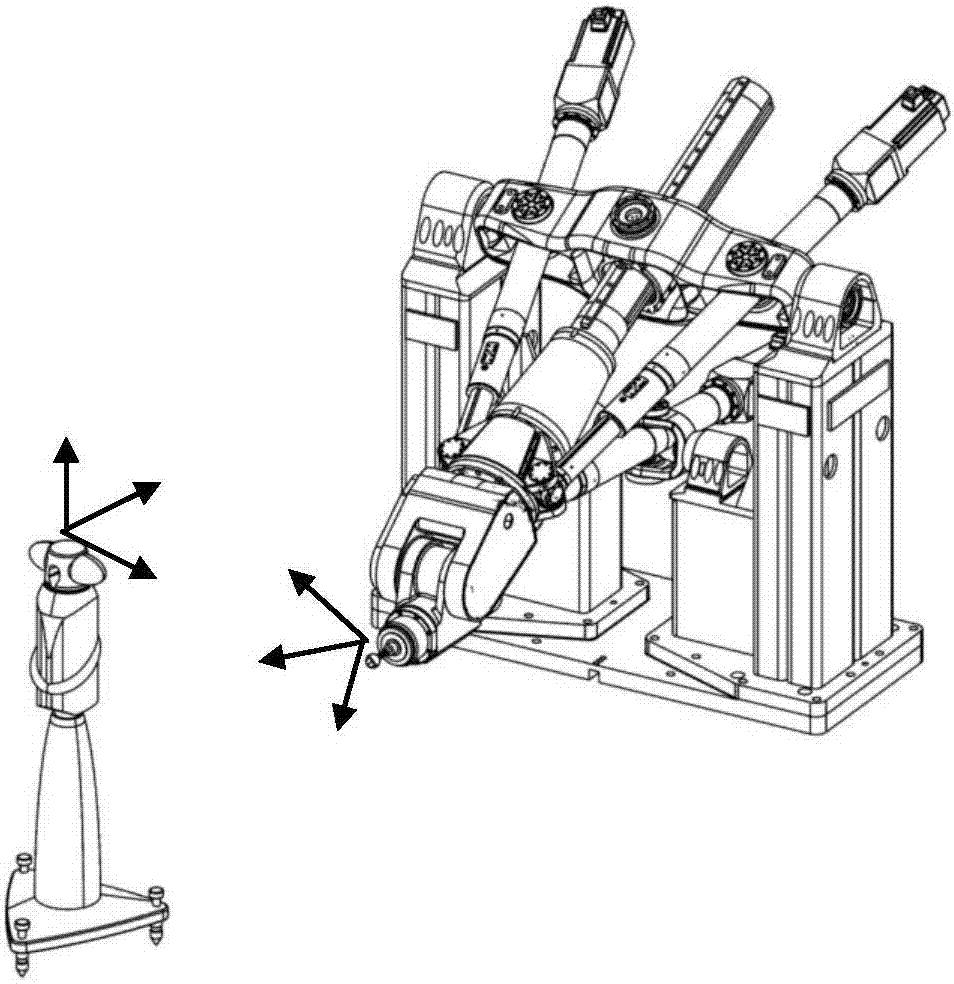
[0026] The online positioning error compensation method of the present invention will be described in detail below in conjunction with a five-degree-of-freedom hybrid robot with a rotating bracket disclosed in Chinese Patent Publication No. CN104985596A.
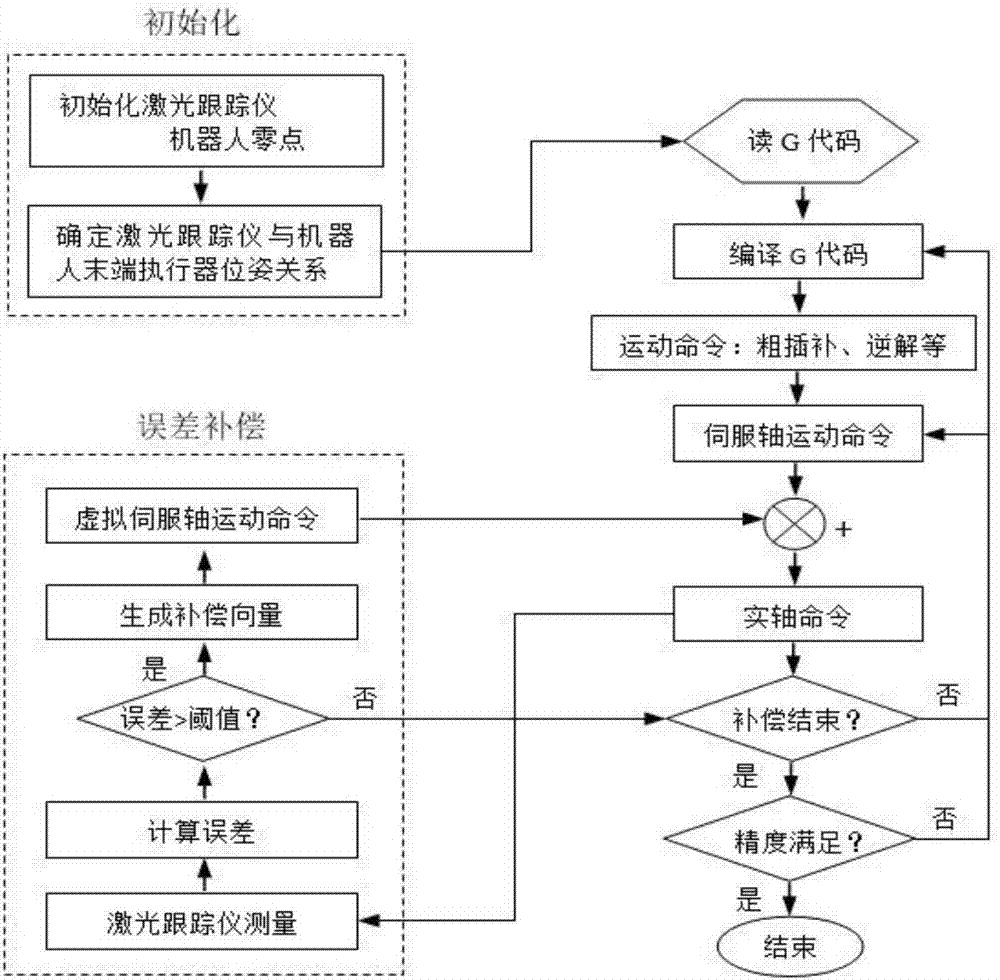
[0027] A method for on-line compensation of robot positioning errors assisted by external measurement of the present invention comprises the following steps:
[0028] (1) The laser tracker is used as the measuring instrument, and the reflective ball of the laser tracker is fixed at the end of the tool of the robot end effector;
[0029] (2) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More