Fire field monitoring and detection system and fire field monitoring and detection method
A detection system and on-site monitoring technology, applied in fire alarms that rely on smoke/gas effects, advanced technology, nan, etc., can solve the problems of insufficient scalability, lack of flexibility and dependence on the monitoring system, and reduce the sensor The effect of network congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0010] The following and accompanying appendices illustrating the principles of the invention Figure 1 A detailed description of one or more embodiments of the invention is provided together. The invention is described in connection with such embodiments, but the invention is not limited to any embodiment. The scope of the invention is limited only by the claims and the invention encompasses numerous alternatives, modifications and equivalents. In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. These details are provided for the purpose of example and the invention may be practiced according to the claims without some or all of these specific details.
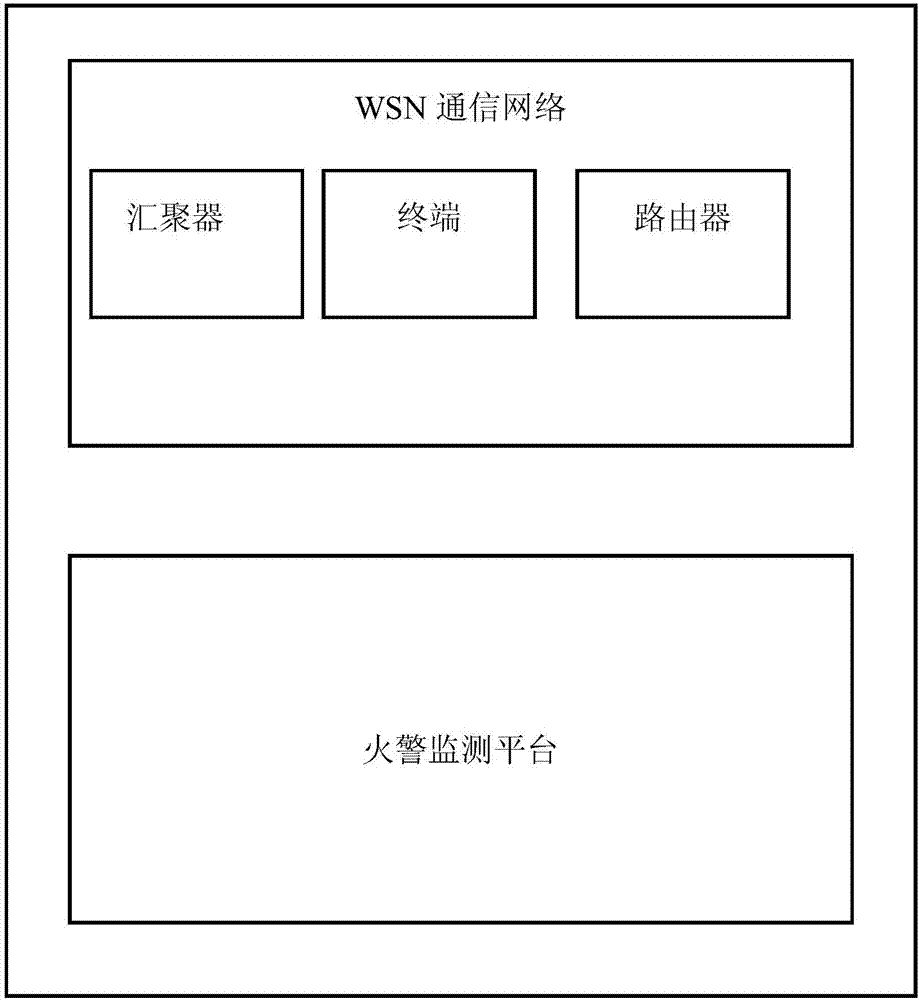
[0011] One aspect of the present invention provides a fire monitoring and detection system and method. figure 1 It is a flow chart of the fire monitoring and detection system and method according to the embodiment of the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



