

Autonomous robot inspection method based on double yellow line detection
A robot and double yellow line technology, applied in the direction of instruments, computer components, character and pattern recognition, etc., can solve the problems of not being able to balance accuracy, flexibility and economy, and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described below in conjunction with the accompanying drawings.
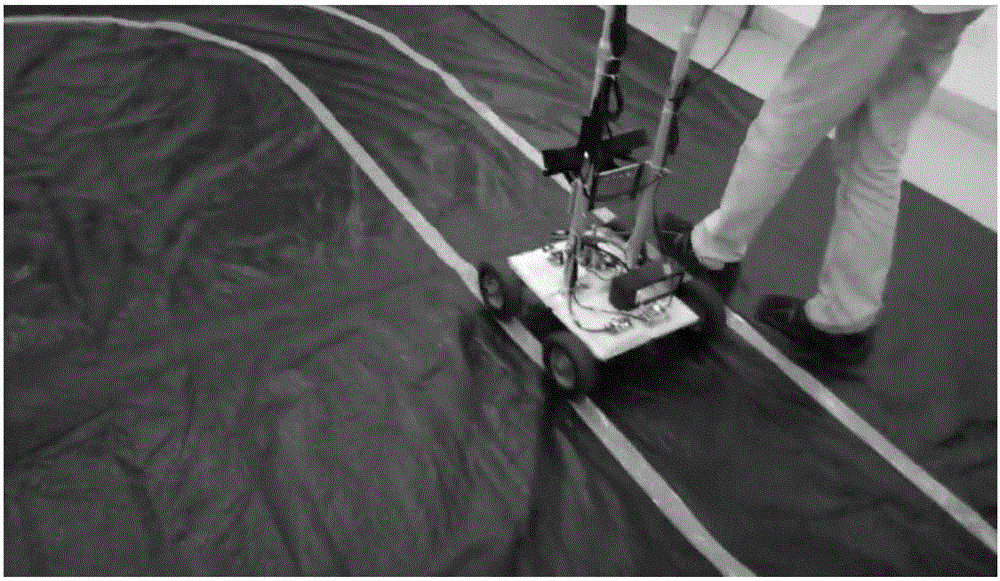
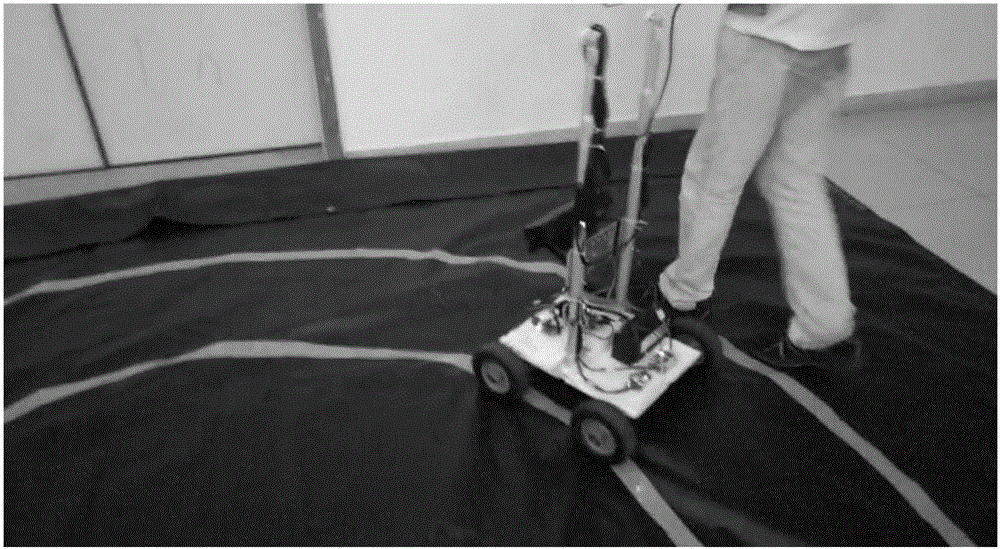
[0068] refer to Figure 1 to Figure 5 , a method for autonomous inspection of a robot based on double yellow line detection, comprising the following steps:
[0069] 1) Image preprocessing
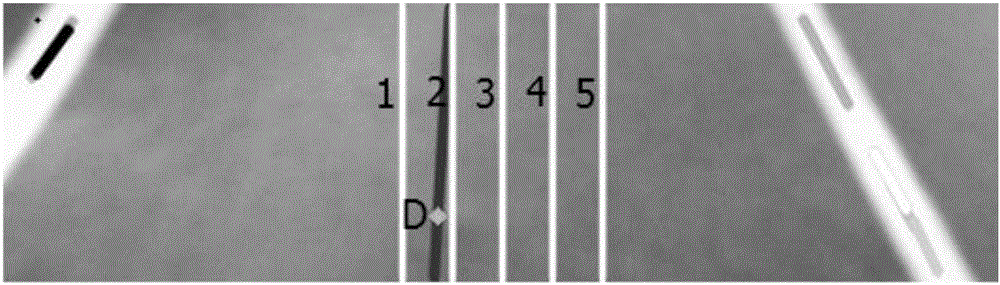
[0070] 1.1) Image downsampling and region of interest extraction
[0071] The image obtained from the kinect camera has a resolution of 1920*1080, but such a high resolution is not required to identify the ecliptic lines. Therefore, the image is scaled to a resolution of 480*270 to reduce the calculation amount of the algorithm and increase the frame rate of the real-time image processing.
[0072] Since the ecliptic lines are arranged on the ground, only the lower half of the picture obtained from the camera presents the ground scene. Therefore, the region of interest is set as the lower half of the image to reduce external influences and improve the accuracy of the algorithm....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More