

Method and apparatus for determining target image location information
A position information and target image technology, applied in the field of image processing, can solve the problem of low accuracy of target image position information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
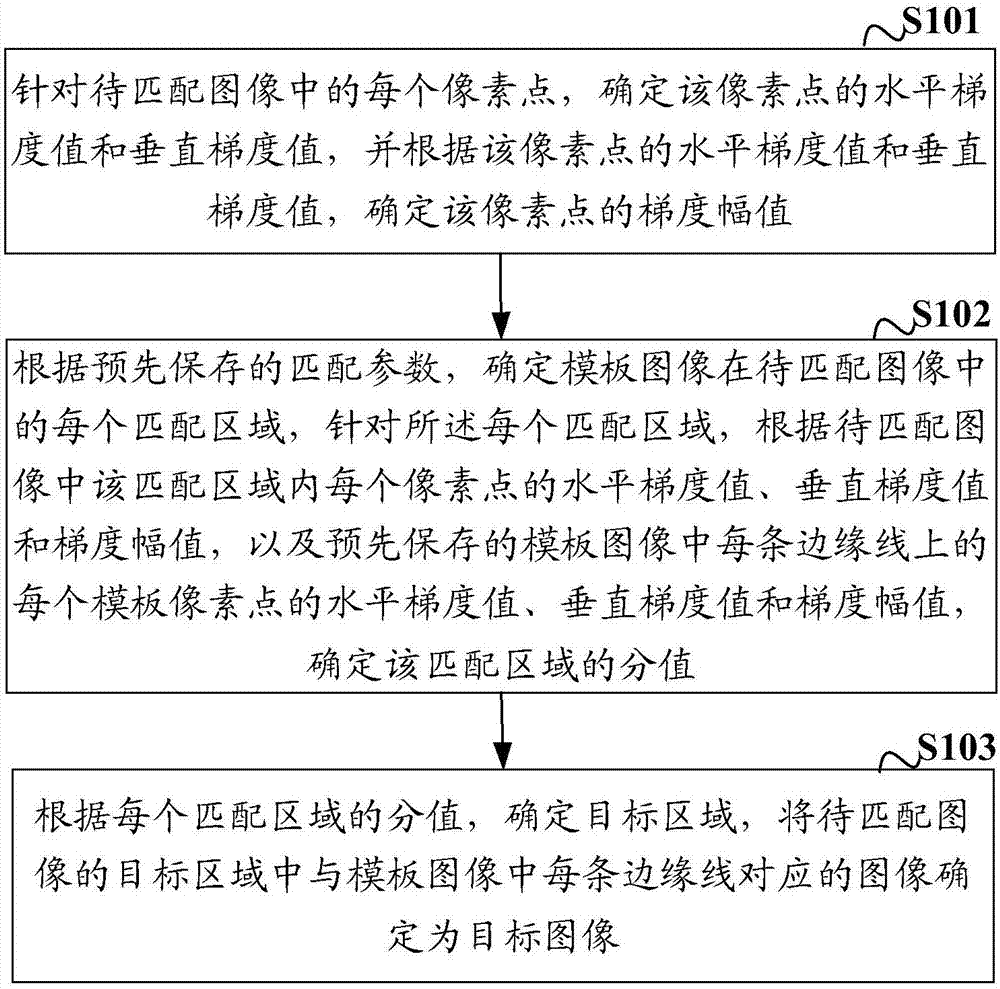
[0076] figure 1 It is a schematic diagram of a process for determining the location information of a target image provided by an embodiment of the present invention, and the process includes the following steps:
[0077] S101: For each pixel in the image to be matched, determine the horizontal gradient value and the vertical gradient value of the pixel, and determine the gradient magnitude of the pixel according to the horizontal gradient value and the vertical gradient value of the pixel.
[0078] The method for determining the location information of a target image provided by the embodiments of the present invention is applied to electronic devices, and the electronic devices include PCs, mobile phones, tablet computers and other devices.
[0079]Specifically, when determining the horizontal gradient value of a pixel point, the horizontal gradient value of the pixel point can be determined according to the pixel values of two pixel points adjacent to the pixel point in th...
Embodiment 2
[0102] On the basis of the above-mentioned embodiments, in the embodiment of the present invention, the process of pre-saving the horizontal gradient value, vertical gradient value and gradient magnitude of each template pixel on each edge line in the template image includes:
[0103] For each template pixel in the template image, determine the horizontal gradient value and the vertical gradient value of the template pixel, and determine the gradient magnitude of the template pixel according to the horizontal gradient value and the vertical gradient value of the template pixel;
[0104]According to the gradient amplitude of each template pixel and the preset first amplitude threshold, the template pixel is filtered to determine the edge template pixel in the template image;
[0105] For each edge template pixel, according to the first difference of the gradient magnitude of the edge template pixel and its two adjacent template pixels in the horizontal direction, and the edge te...
Embodiment 3
[0119] In order to further improve the accuracy of the edge template pixels in the determined template image, on the basis of the above-mentioned embodiments, in the embodiment of the present invention, the gradient magnitude of each template pixel and the preset first Amplitude threshold, after the template pixel is filtered, before determining the edge template pixel in the template image, the method also includes:
[0120] For each template pixel after filtering, determine the second neighborhood including the template pixel; determine the gradient direction of the template pixel according to the horizontal gradient value and the vertical gradient value of the template pixel, and determine Two position points corresponding to the gradient direction of the template pixel in the second neighborhood; according to the gradient magnitude of each template pixel in the second neighborhood, using a bilinear interpolation algorithm to determine The gradient magnitudes of the two pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More