Transporting robot wagon and control method thereof
A control method and robot technology, applied in the direction of vehicle position/route/height control, motor vehicle, transportation and packaging, etc., can solve the problems of low degree of intelligence and inconvenience, and achieve the effect of high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
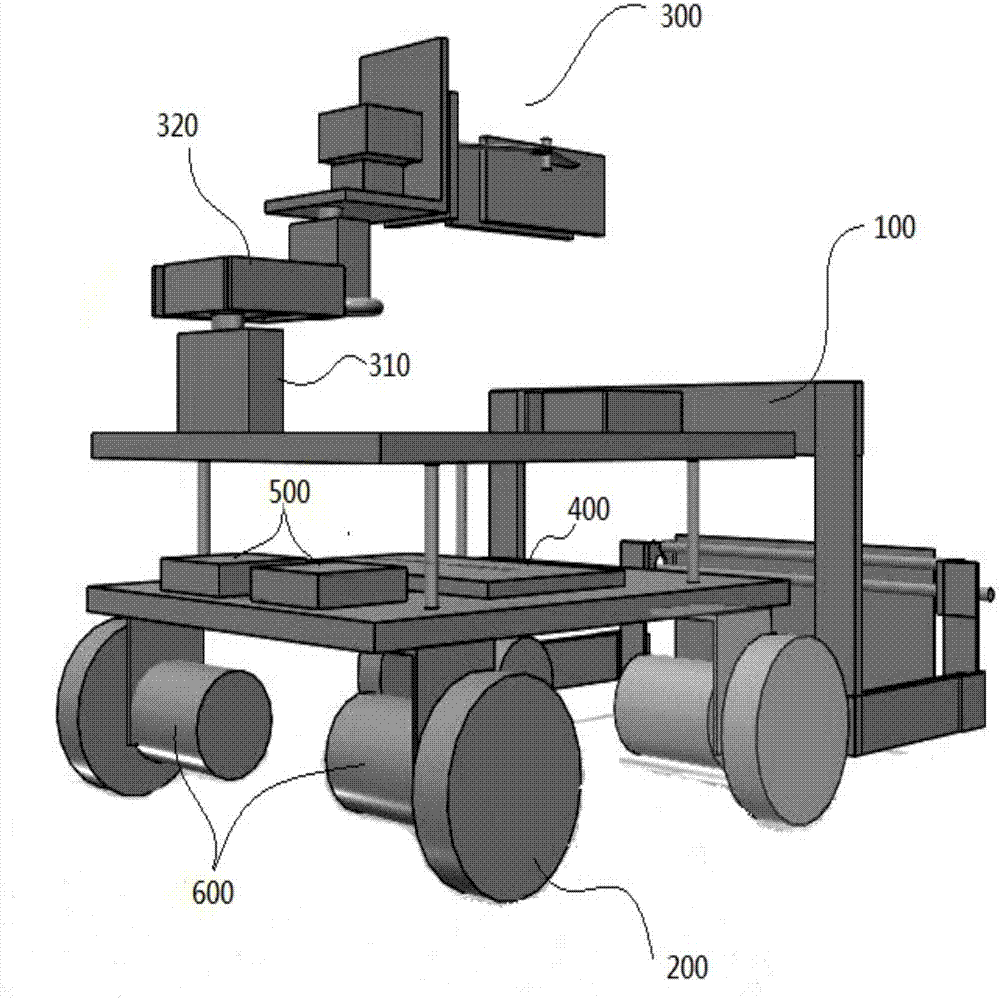
[0030] Please refer to Figure 1-Figure 2 , the present invention is a transport robot car, comprising:
[0031] The vehicle frame 100 is provided with a plurality of wheels 200 at the lower end of the vehicle frame 100 , and in this embodiment, the number of the wheels 200 is four.
[0032] A mechanical arm 300, the mechanical arm 300 is arranged on the vehicle frame 200, the mechanical arm 300 includes a plurality of steering gears 310 and a plurality of swing arms 320, a plurality of steering gears 310 drives a plurality of swing arms 320, each The steering gear 310 is provided with a position detector, and the position detector detects the position of the swing arm 320 and generates a position signal.
[0033] The power assembly drives the four wheels 200 to rotate, so that the robot car moves forward. The power assembly includes two motor drives 500 and four motors 600, one motor drive 500 controls two motors 600, the motor 600 can drive the wheel 200 to rotate, one mot...
Embodiment 2
[0048] according to Figure 1-Figure 2 , the present embodiment, a control method for a transport robot car, comprising the following steps:
[0049] S1, setting the robot car to drive on a preset path painted with a single color, multiple tracking modules identify the preset path by identifying the color, and then generate a path signal, and send the path signal to the processor; the preset A different color for the environment where the path is described than the preset path.
[0050] A plurality of tracking modules detect preset paths from the front, left, and rear of the robot car, each tracking module generates a path signal, and each tracking module directly sends its own path signal to the processor.
[0051] The tracking module can also identify the curve and track slope of the track, and the tracking module sends path signals to the robot car regularly. In this embodiment, the number of the tracking modules is three, and the tracking module is three. The tracking mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com