

A cargo pallet detection method and system based on point cloud plane contour matching
A plane contour and contour matching technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of low accuracy, the influence of complex lighting, and the high price of multi-line laser radar, and achieve low cost and high detection accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
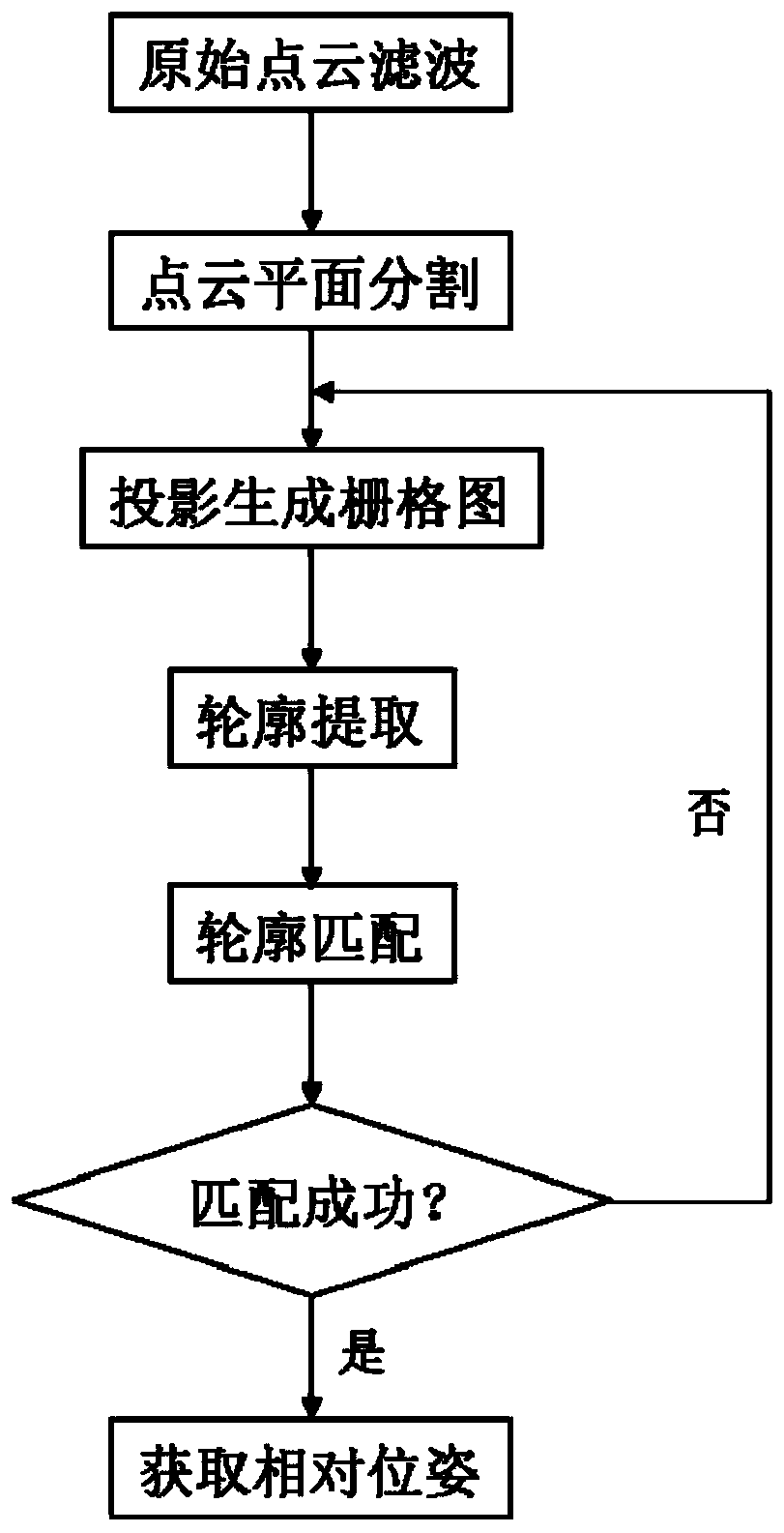
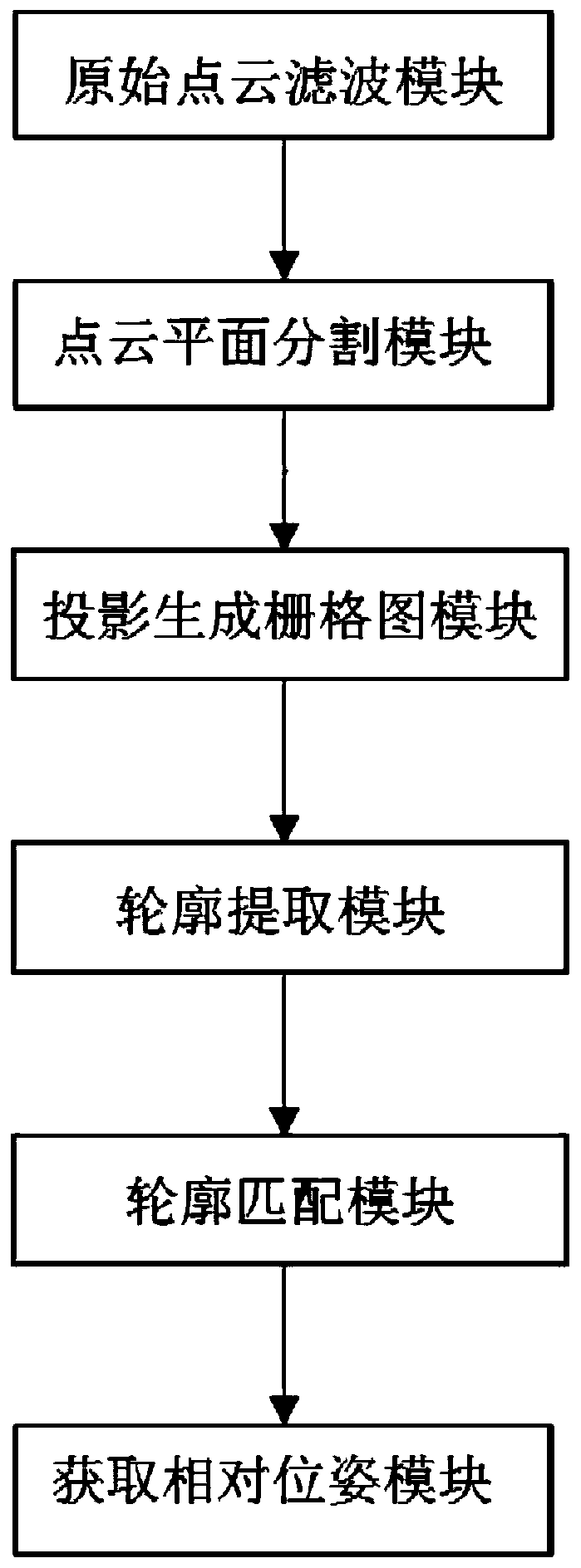
[0041] refer to figure 1 As shown, a flow chart of a cargo pallet detection method based on point cloud plane contour matching, including the following steps:
[0042] Step 1: The sensor collects the point cloud of the storage environment including the cargo pallet, and removes sparse outliers through the filtering algorithm;
[0043] Step 2: Estimate the normal of the point cloud obtained in step 1, and use the region growing algorithm based on the normal constraint to segment the point cloud in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More