Unmanned aerial vehicle flight control system and method based on Beidou navigation
A control system, UAV technology, applied in control/adjustment system, radio wave measurement system, three-dimensional position/channel control and other directions to achieve the effect of increasing flight speed and reducing flight energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
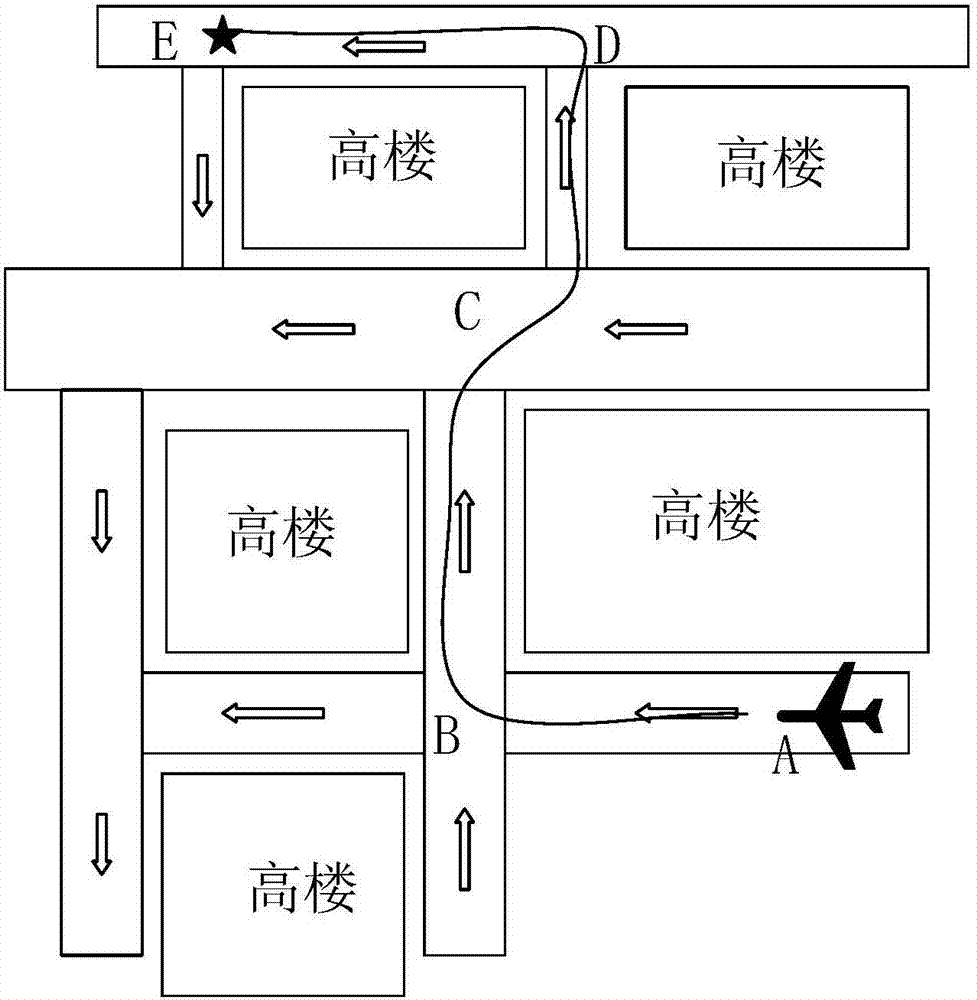
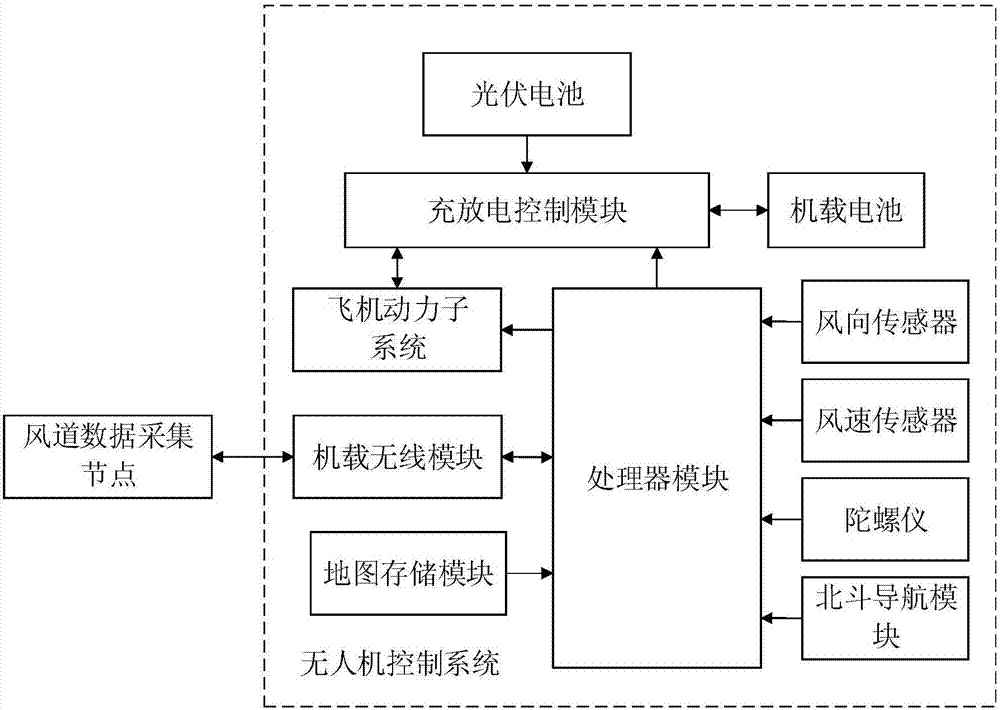
[0022] The UAV control system of this embodiment includes: a processor module for controlling the UAV to fly on a corresponding path (which may be a preset path, or a path controlled by a remote human in real time through a remote server) by the operator ( Using ARM embedded controller, single-chip microcomputer or Snapdragon 801 processor, etc.), the wireless communication module connected to the processor module (preferably: 3G or 4G communication module, and / or, satellite communication module), and the processor module A connected path optimization subsystem; the path optimization subsystem is suitable for obtaining real-time data of the wind between buildings, and establishes an urban air duct network between buildings; after the drone sets the flight destination, the path optimization subsystem It is suitable for selecting the optimal path for the UAV to fly to the destination according to the air duct network between buildings in the city.
[0023] Specifically, the real...
Embodiment 2
[0039] On the basis of Embodiment 1, the present invention also provides a flight control method of the UAV, that is, to select the path for the UAV to fly to the destination to obtain the optimal path.
[0040] For details about the UAV and its control system in Embodiment 1, please refer to the detailed description in Embodiment 1.
[0041] The method of selecting the path for the UAV to fly to the destination to obtain the optimal path includes:
[0042] Obtain real-time data of the wind between buildings, and establish the air duct network between buildings in the city; when the drone sets the flight destination, the processor module in the drone is adapted to The network selects the optimal path for the UAV to fly to the destination.
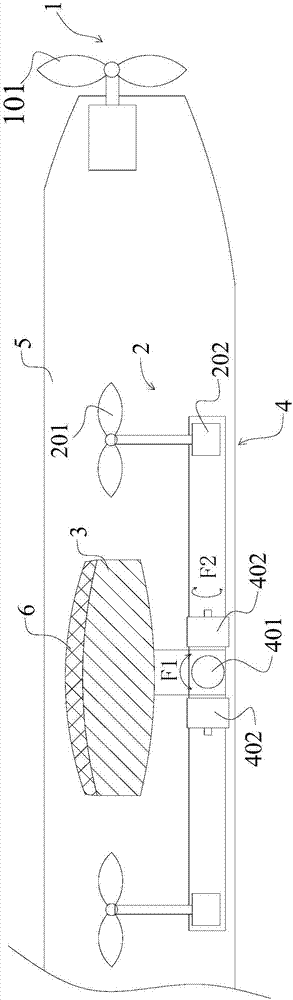
[0043] The wings of the drone are covered with photovoltaic cells, and the path optimization subsystem is also suitable for obtaining the real-time light intensity between buildings; when the path optimization subsystem selects the optimal...
Embodiment 3
[0052]On the basis of the above two embodiments, another modified implementation is: each node processor sends the wind speed and wind direction data to a remote server through a wireless module, and the remote server obtains the real-time data of the wind between buildings , and establish the urban inter-building air duct network; the remote server will send the obtained real-time data of the inter-building air duct network and the urban inter-building air duct network information to the UAV by wireless; when the UAV sets the flight destination Afterwards, the path optimization subsystem or the remote server is suitable for selecting the optimal path for the UAV to fly to the destination according to the air duct network between buildings in the city; After the optimal route to the destination, the remote server sends the optimal route to the processor module of the drone.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com