Air bag type robot leg buffer mechanism with rigidity being adjustable
A cushioning mechanism and airbag-type technology, applied in the field of leg cushioning mechanism, can solve the problems that the spring stiffness cannot be adjusted online and the structure is complicated, and achieve the effects of reducing impact force, simple structure and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
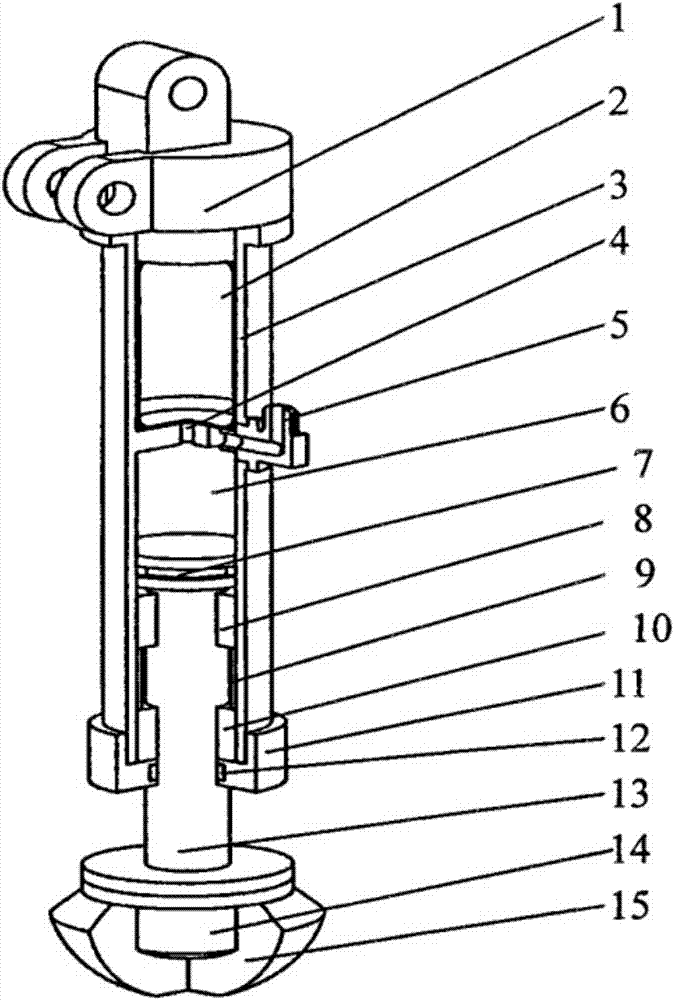
[0018] The structure of the present invention is as figure 1 As shown, it mainly includes a connecting block 1, an air bag 2, a leg outer cylinder 3, a telescopic rod 13, a force sensor 14 and a rubber sleeve 15. The present invention is used as the stub of the robot leg, and the connecting block 1 is installed on the upper end of the leg outer cylinder 3 for connecting with other parts of the robot leg. The telescopic rod 13 is positioned and installed in the leg outer cylinder 3 through the linear bearings 8 and 10, and its lower part stretches out from the leg outer cylinder 3. Between the two ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap