

PC terminal APP system for six-degree-of-freedom manipulator demonstration teaching control
A technology of manipulator and PC end, applied in the field of manipulator teaching controller system, can solve the problems of teaching track optimization, cumbersome and inconvenient user operation, space limitation and lack of confidentiality, etc., and achieve uniform speed change and smooth teaching track Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
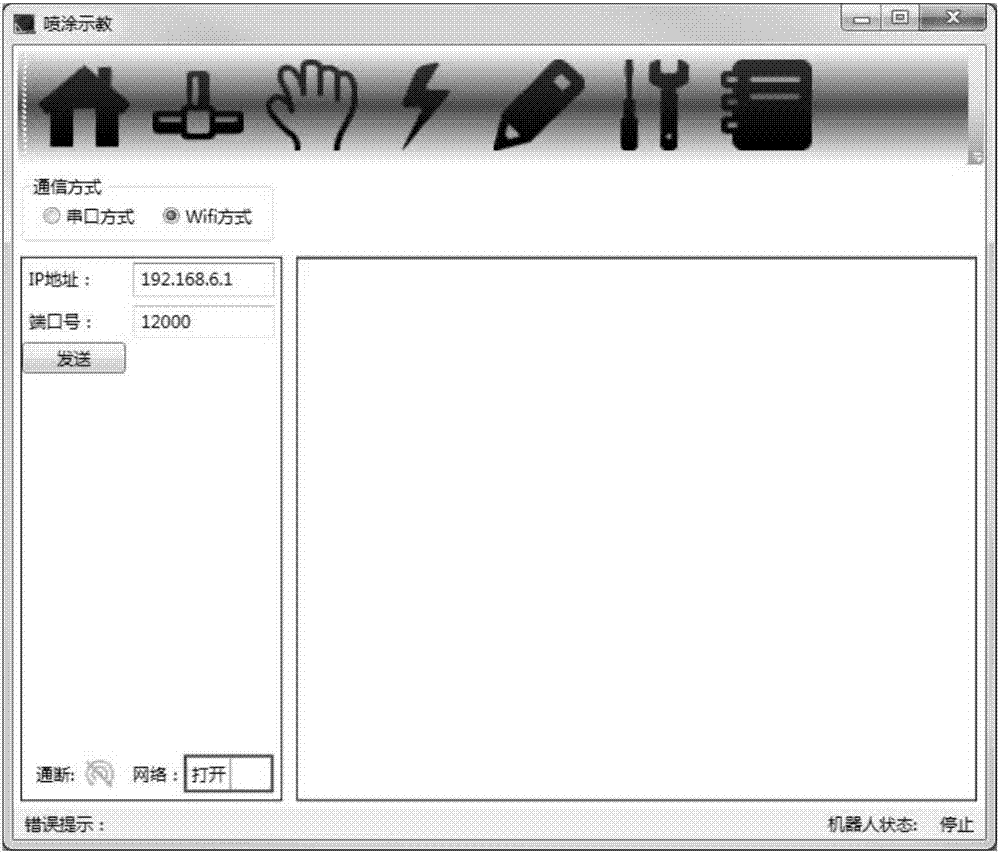
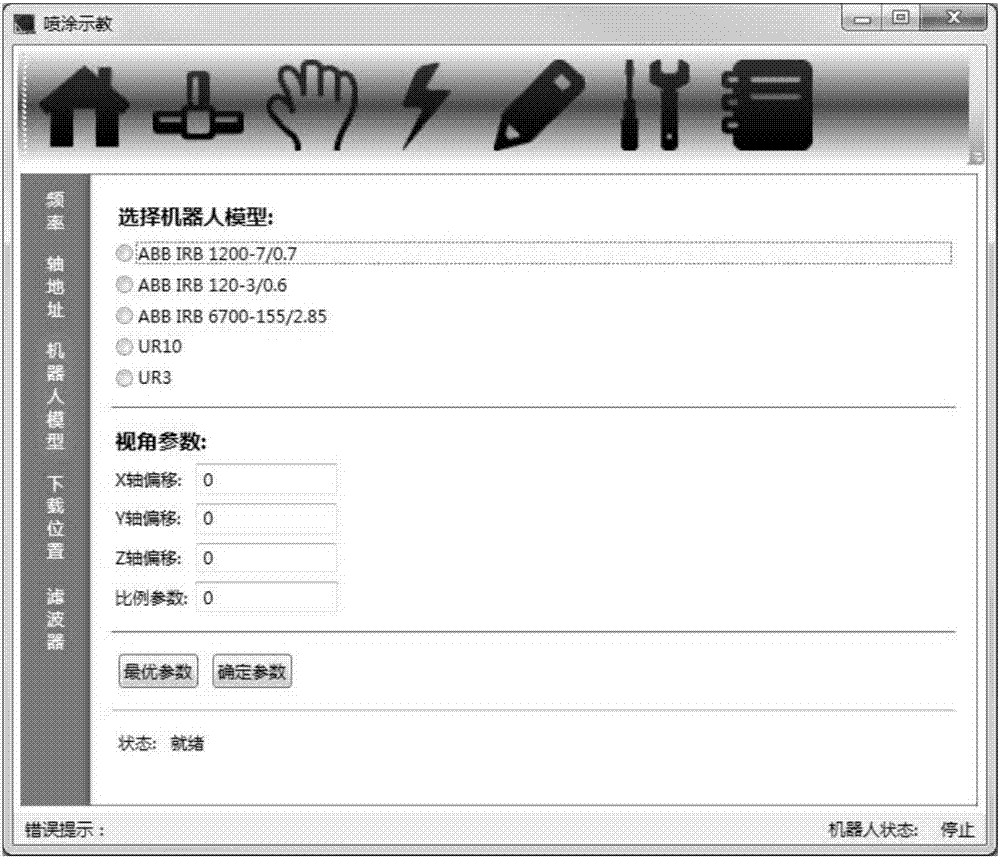
[0090] Combining Figure 1 and figure 2 , the specific implementation of the patent of the present invention is as follows:
[0091] The user downloads and installs the PC-side APP on a Windows system computer. After the installation is completed, the teaching operation of the six-degree-of-freedom robotic arm can be performed.
[0092] The PC end uses the wireless network connection function to access the WiFi hotspot of the data collector; on the interactive interface of the PC end APP, open the WiFi connection operation interface of the PC end APP, set the local IP address and port number of the PC end APP, and lock the data The IP address and port number of the collector, click the open button to establish a data communication connection; open the robot arm model selection interface of the PC-side APP, select the currently used robot model, and obtain the relevant connecting rod parameters; open the joints of the PC-side APP Angle positive and negative calibration interf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More