

Wirelessly-controlled six-degree-of-freedom mechanical arm teaching system
A wireless control, robotic arm technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of no design, no teaching trajectory optimization, inconvenient user interaction, etc., to achieve efficient and stable data transmission and teaching. The effect of smooth trajectory and easy connection establishment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
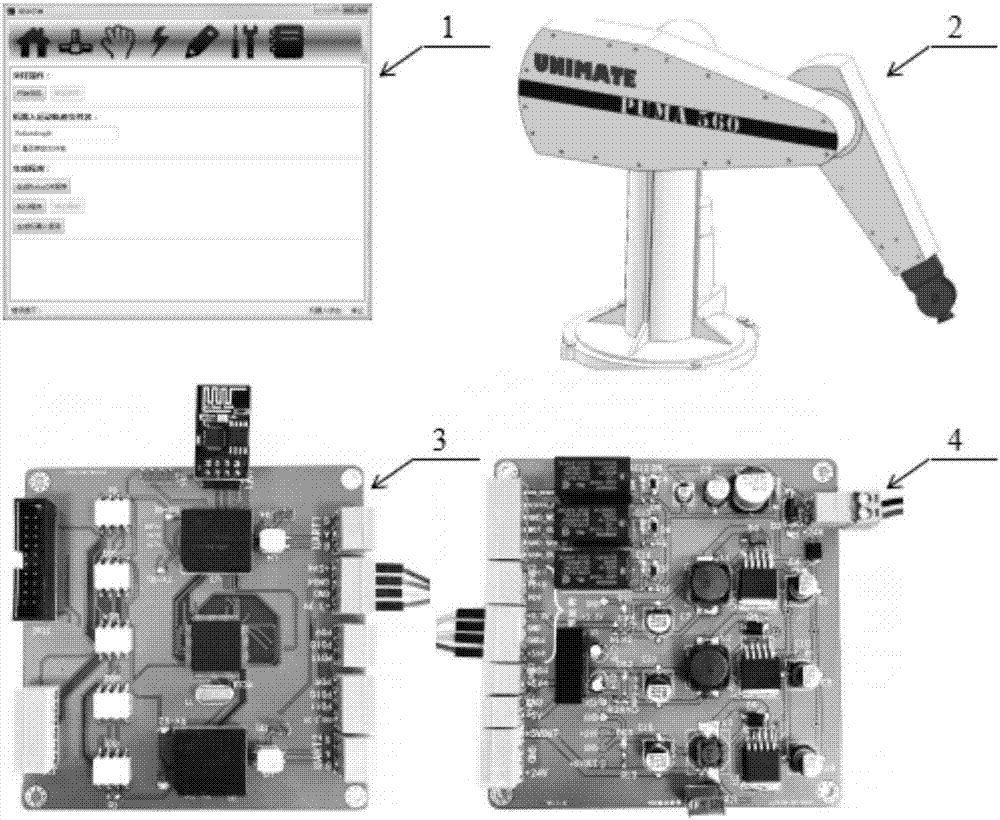
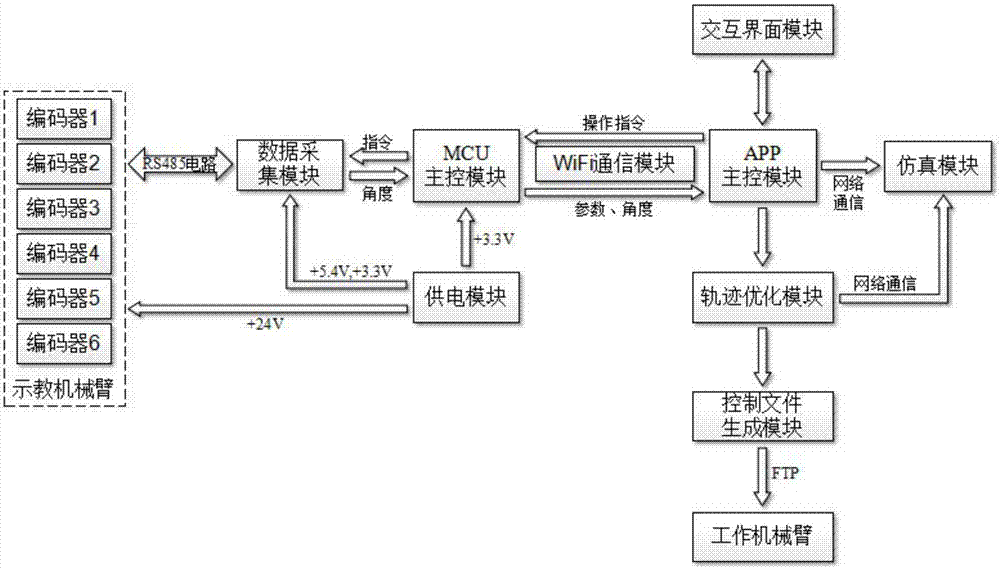
[0100] to combine figure 2 And Fig. 3, the specific implementation mode of the patent of the present invention is as follows:
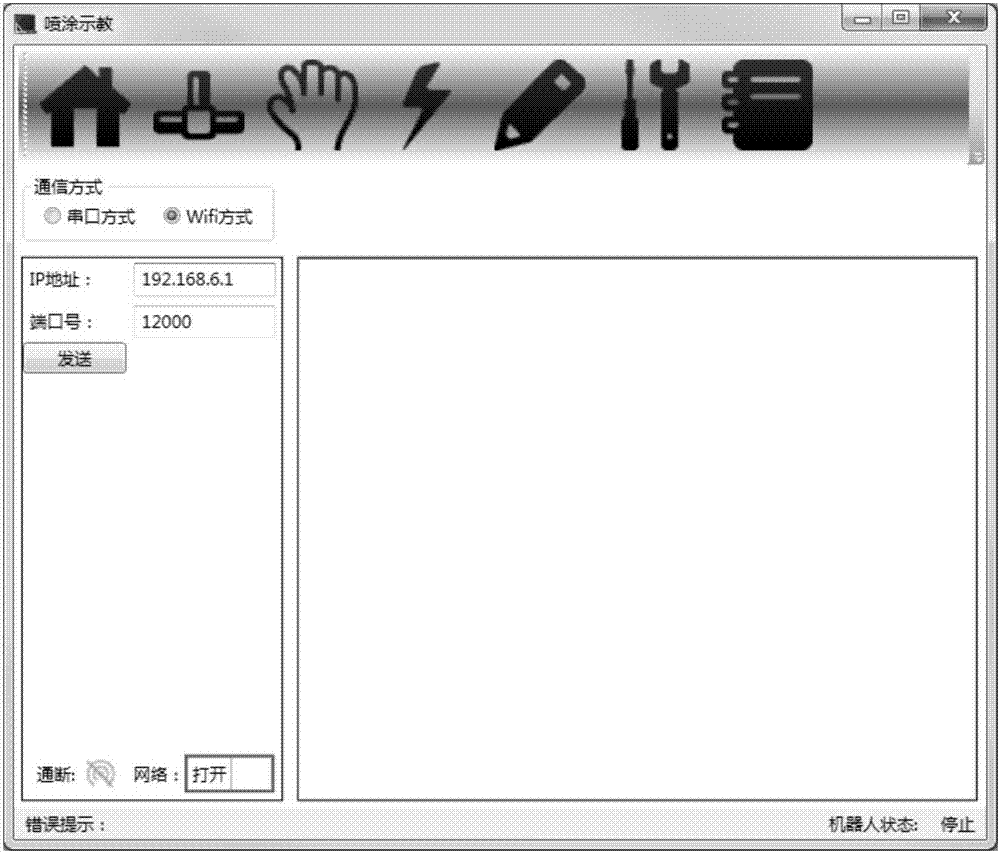
[0101] The PC-side APP is installed on the user's computer, and the data collector is connected to the power module. according to figure 1 Description After setting up the robotic arm teaching platform, the user can perform the teaching operation of the six-degree-of-freedom robotic arm.
[0102] The user connects the power supply module to an external +24V power supply. The power supply module uses LM2576S series step-down chips and B0505S series power supply chips. After stepping down and stabilizing the external voltage, the power supply module provides +3.3V, +5.4V and +24V power supplies.
[0103] The MCU main control module adopts the STM32F103 series main chip, which requires +3.3V external power supply, which is provided by the power supply module. The MCU main control module can control the WiFi communication module to open the WiFi hots...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More