

RFID-based robot indoor locating method
An indoor positioning and robot technology, applied in the field of RFID-based indoor positioning of robots, can solve the problems of improving positioning accuracy, large errors, and difficulty, and achieve the effect of improving accuracy and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0093] The RFID-based indoor positioning method for robots in this embodiment is changed from calculating the time value of RSSI to calculating the mean value of RSSI, and using the fireworks algorithm to optimize the maximum likelihood positioning method for positioning calculation. The specific steps are as follows:
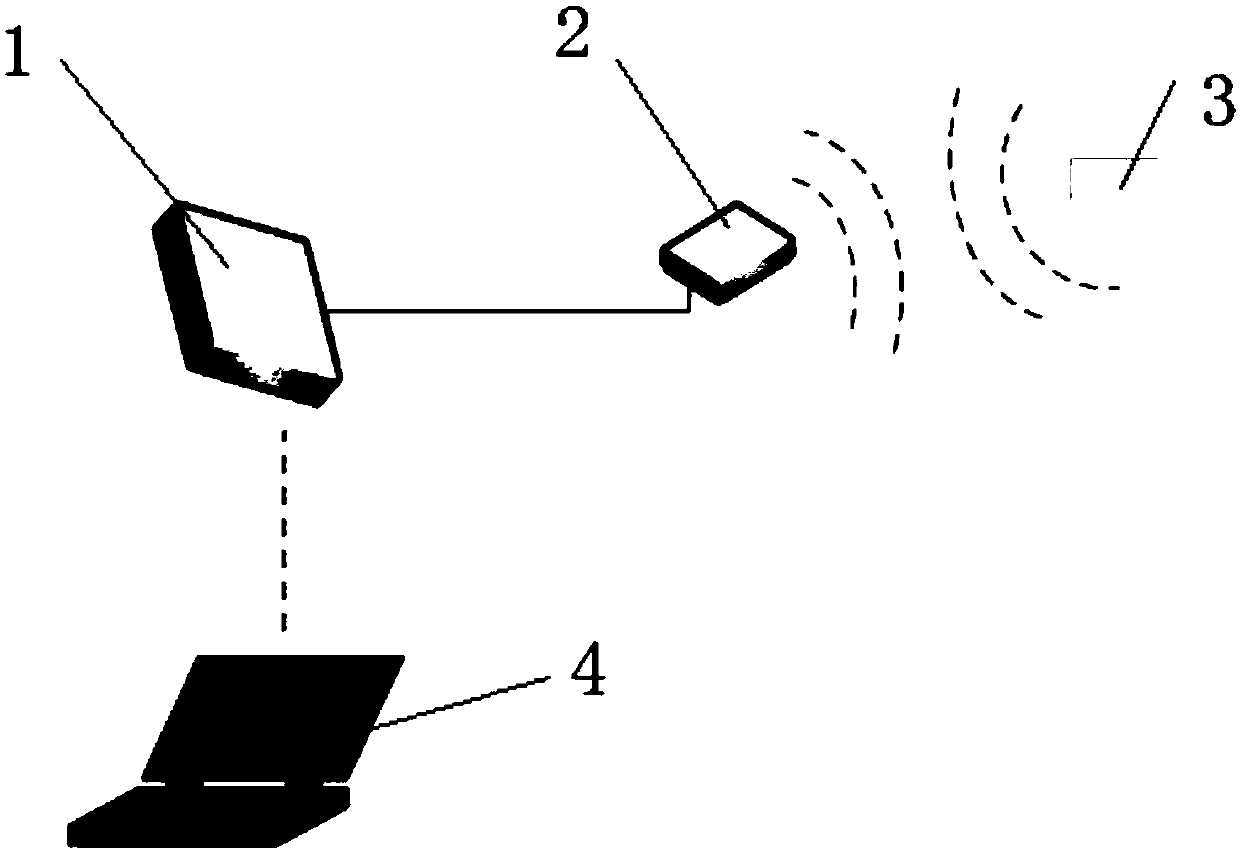
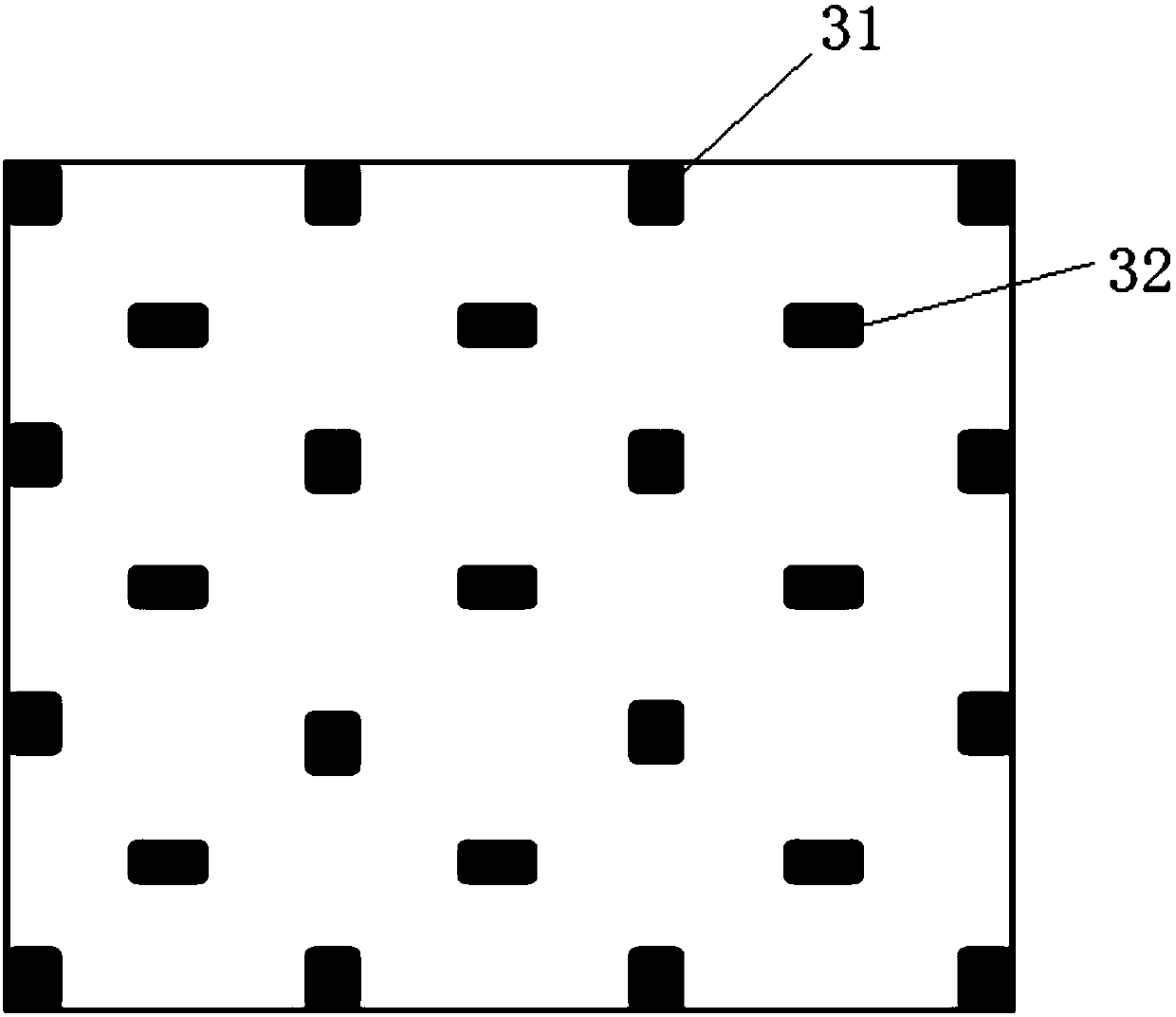
[0094] The first step is to install and initialize the RFID system: select a 3m×3m indoor positioning area, adopt a cross-distribution strategy to lay electronic tags 3 at intervals of 0.6 meters on the ground of the room to be positioned, a total of 33, and install readers and antennas on the robot , the reader is connected to the host computer; the positioning area in the room to be positioned is used to establish a logical coordinate system, and the position coordinates of each electronic tag under the logical coordinate system are stored in the memory of the electronic tag;
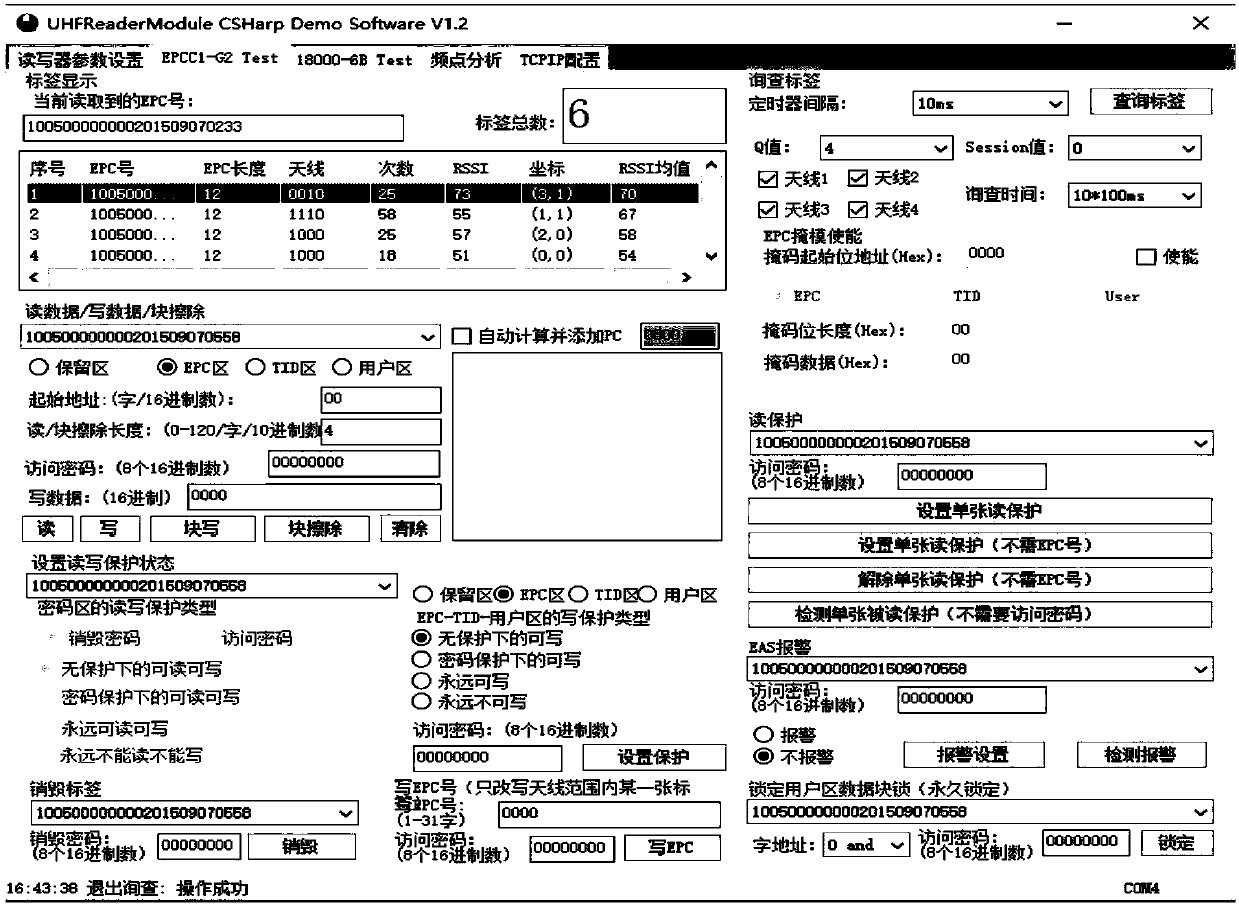
[0095] The second step is to read the average RSSI value of the electronic tag and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More