

Model Predictive Control Method for Intelligent Vehicle Trajectory Tracking Based on Model Compensation
A technology of model predictive control and intelligent vehicles, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as no real-time update, mismatch between vehicle model and controller model, etc., to improve accuracy, solve problems Model mismatch problem, effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
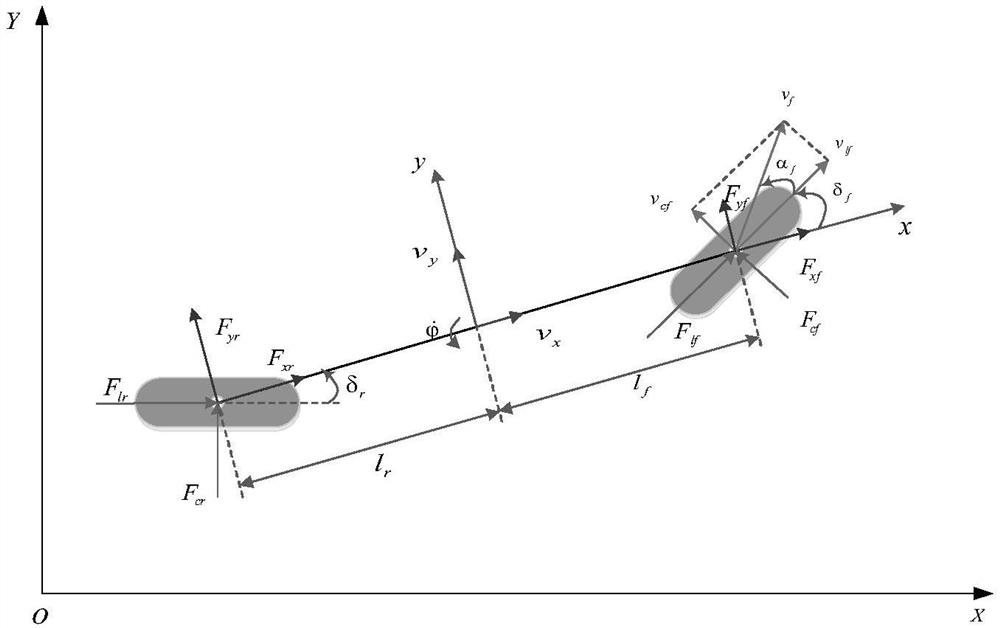
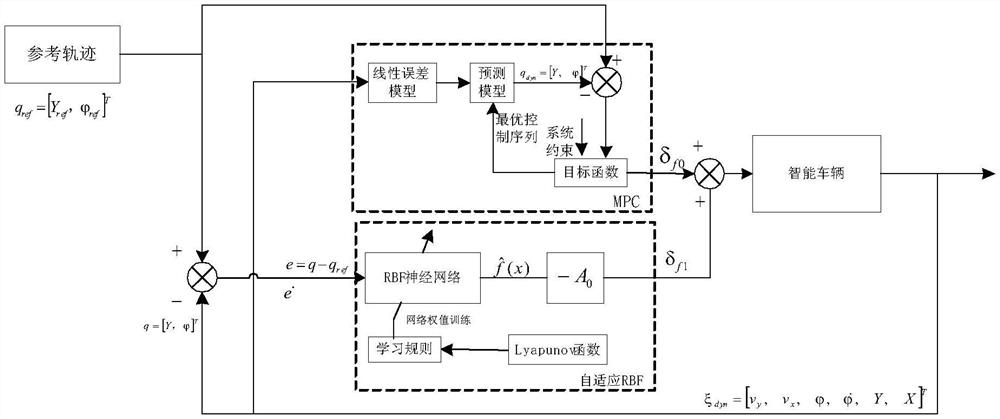
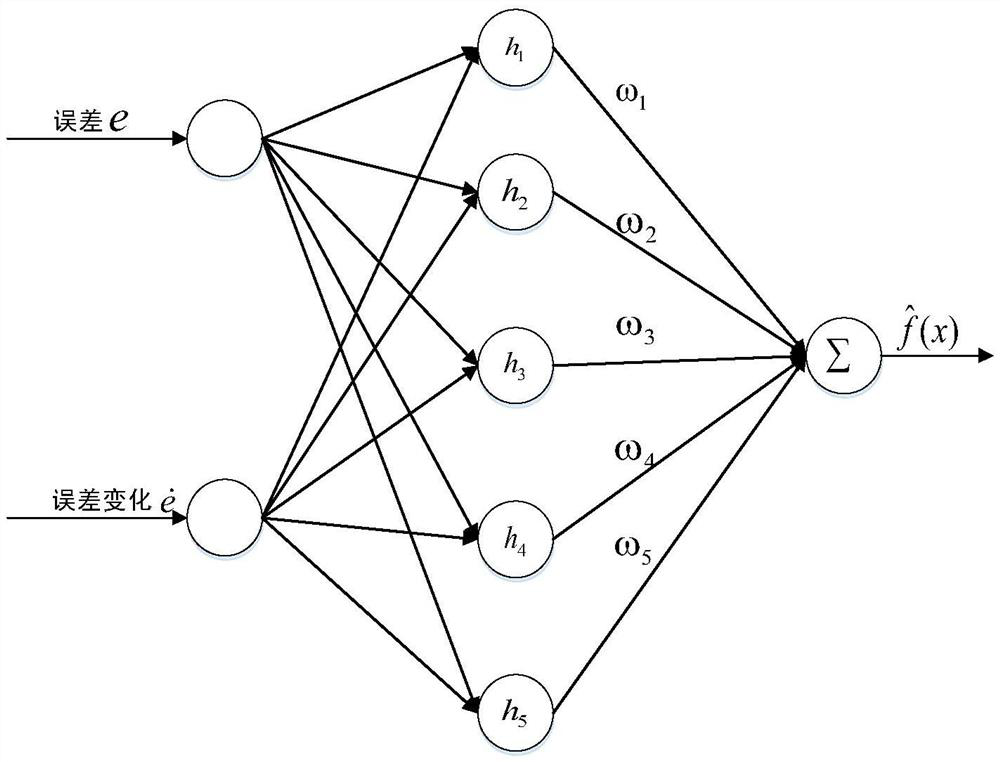
[0030] The intelligent vehicle trajectory tracking model predictive control method based on model compensation described in the present invention. First establish a 2-DOF vehicle dynamics model, based on the dynamics model, according to the model predictive control (MPC) theory, to predict the output of the model and expected trajectory Deviation between the design objective function, to find the optimal control amount front wheel deflection angle (δ f0 ) control the trajectory of the intelligent vehicle tracking expectation; suppose the difference between the built vehicle dynamics model and the real vehicle dynamics model in the present invention is the modeling uncertain part f(x); design with the current trajectory of the vehicle and the expected trajectory The error e and the error variation of for input, For the adaptive RBF neural network output, the Lya...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More