

Unmanned aerial vehicle optimal path planning method based on adaptive ant colony algorithm
An optimal path planning and ant colony algorithm technology, applied in the information field, can solve the problems of slow search speed, large memory space, and premature planning path time of genetic algorithm, so as to shorten the convergence time and improve the success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
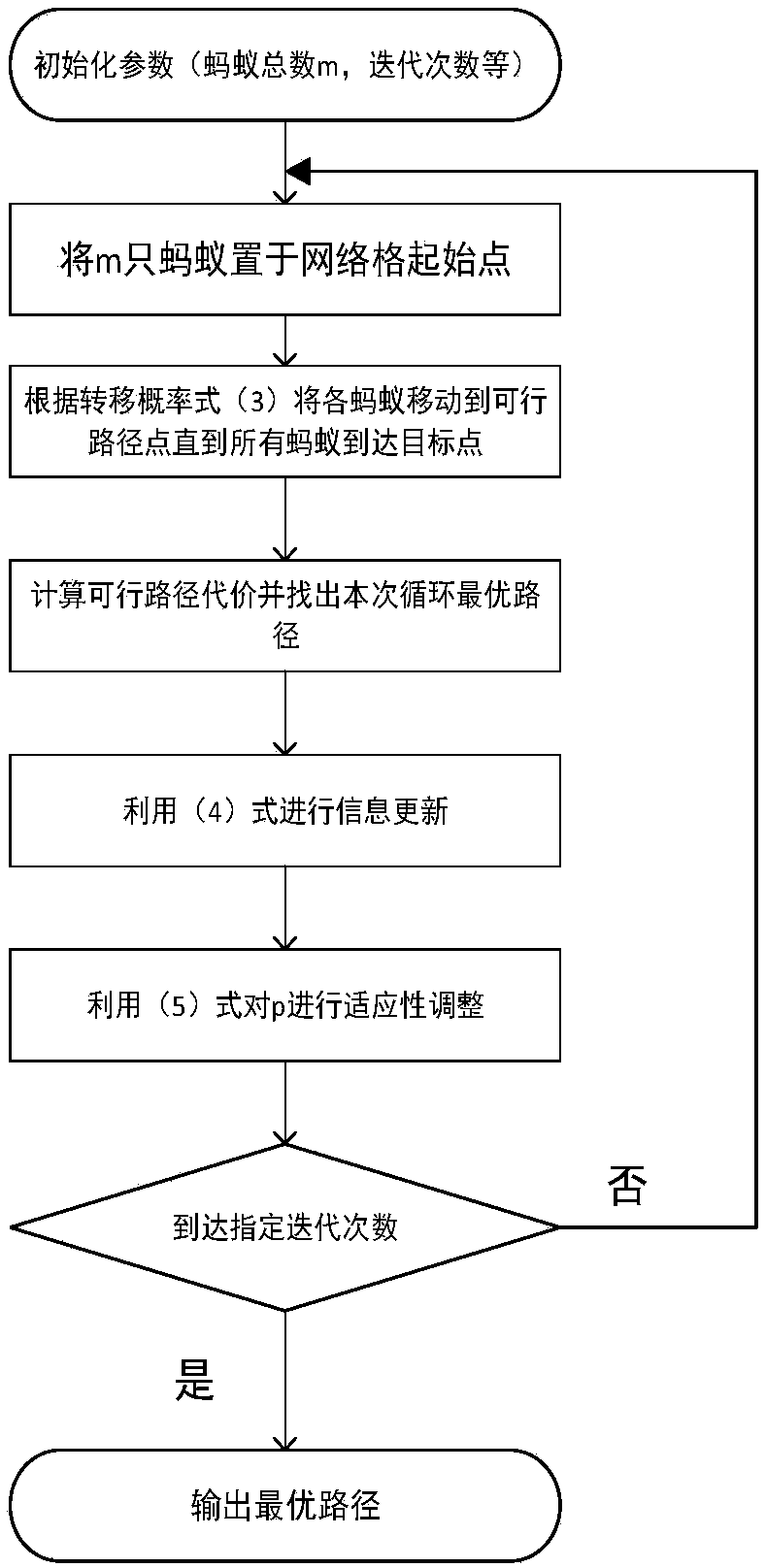
[0027] please see figure 1 , a kind of unmanned aerial vehicle optimal path planning method based on self-adaptive ant colony algorithm provided by the present invention, comprises the following steps:
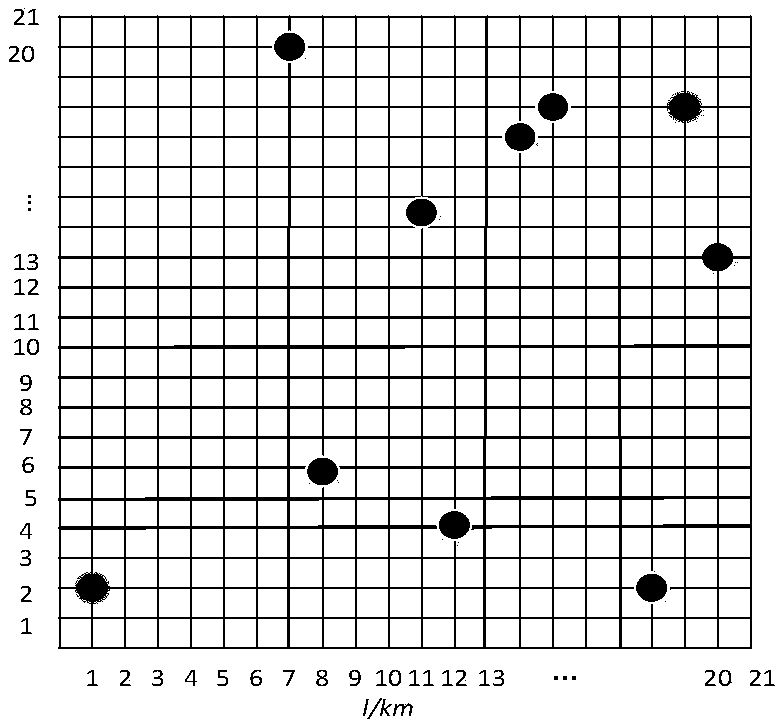
[0028] Step 1: grid the flight area;
[0029] First, a two-dimensional rectangular coordinate system is established in the flight area, and it is divided into m×n unit grids at equal intervals according to the size of the flight area and the distribution of threat sources. Such as figure 2 Corresponding to the UAV task grid diagram established based on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More