

Method and system for dynamic identification and location of charging pile based on Kinect
A technology of dynamic identification and positioning method, which is applied in the field of mobile robots, can solve the problems of serious impact of light conditions and lack of universality, and achieve the effects of not being easily disturbed by light, stable dynamic tracking, and accurate recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
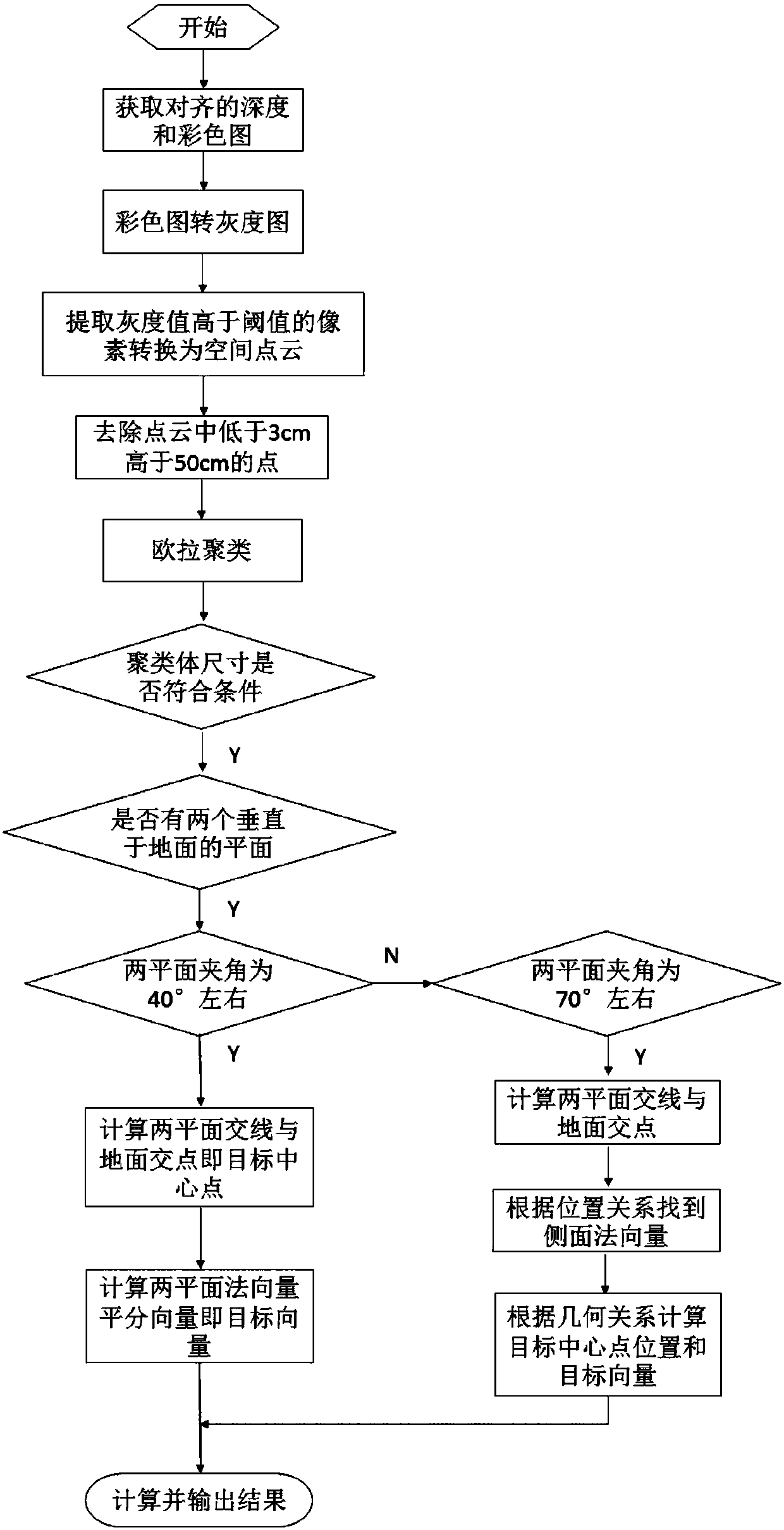
[0059] like figure 1 As shown, the present invention discloses a Kinect-based charging pile dynamic identification and positioning method, comprising the following steps:
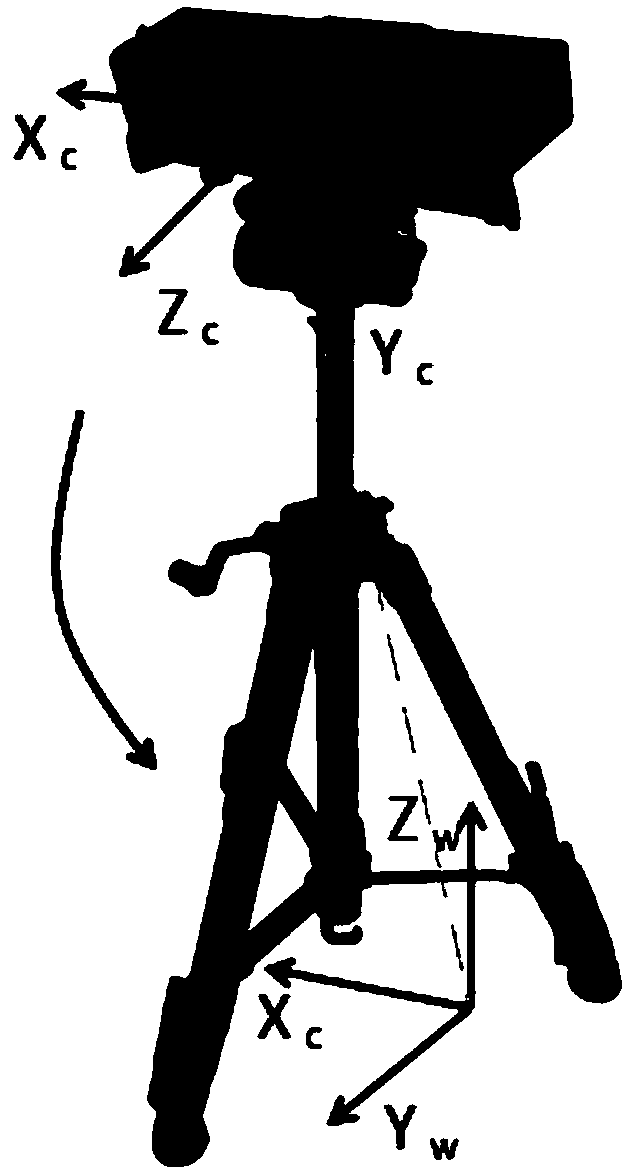
[0060] Step 1: according to the three-dimensional point cloud data that Kinect sensor obtains, calculate camera coordinate system to the conversion matrix of setting world coordinate system;
[0061] Step 2: obtain color and depth images by Kinect, and align the pixels in color maps and depth maps one by one;
[0062] Step 3: Remove invalid pixels from the image obtained in step 2, convert the remaining pixels into a three-dimensional point cloud and remove points higher than 50cm or lower than 3cm;
[0063] Step 4: the down-sampling of the point cloud obtained in step 3 to reduce the amount of calculation for subsequent processing, and carry out radius filtering to the point cloud to remove outliers;
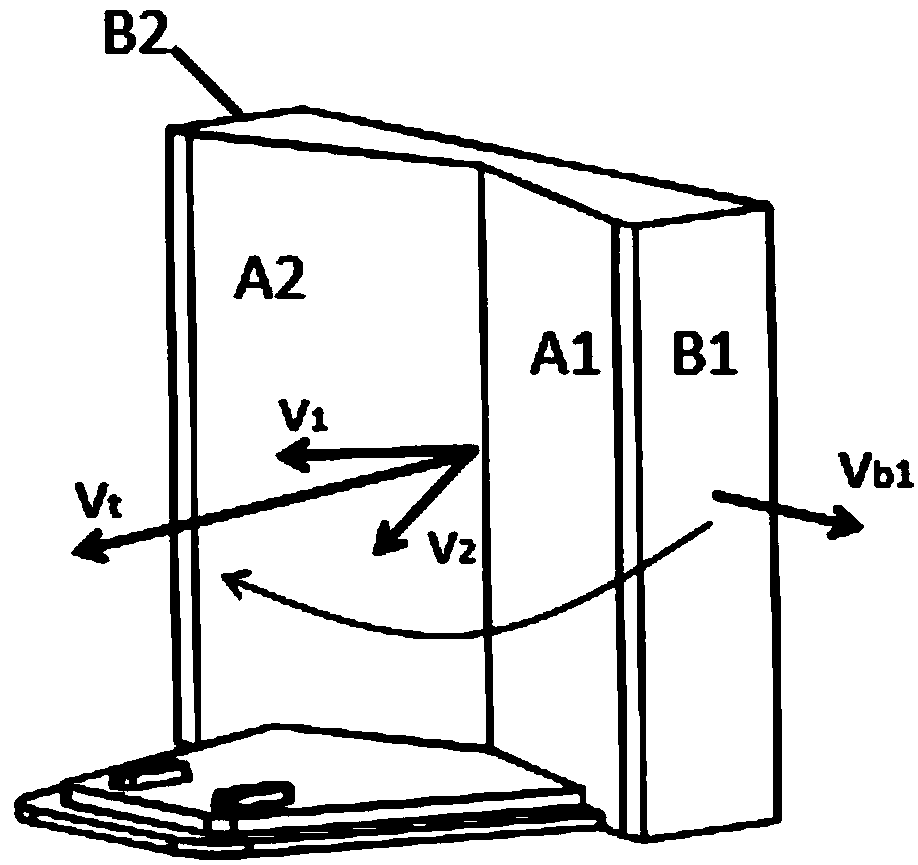
[0064] Step 5: the point cloud that step 4 obtains is carried out Euclidean clustering, obtains one or ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More