

Adaptive Robust Control Method for Launch Platform Based on Friction Compensation
A self-adaptive robust, launch platform technology, applied in the control field, can solve the problem of not considering friction compensation, and achieve the effect of simple controller, easy engineering practice, and excellent control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
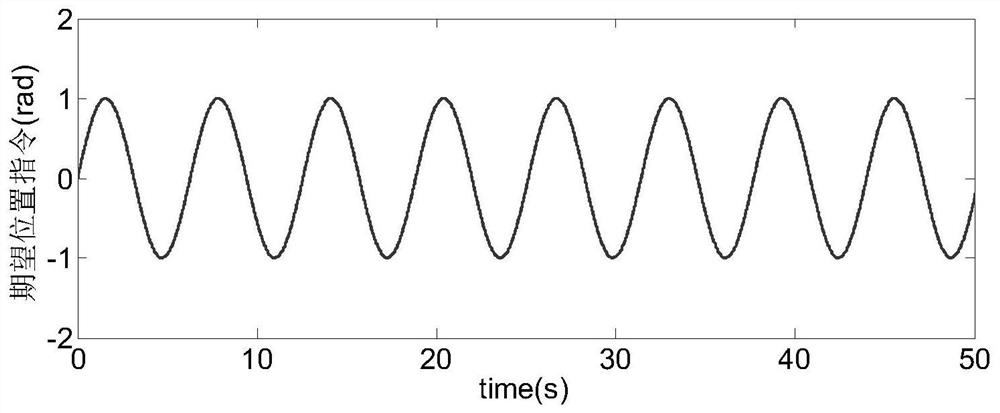
[0077] The simulation parameters are: m=0.2kgm 2 , T L =2Nm,d=0.03x 1 x 2 , σ 0 =0.03Nm / rad,σ 1 =0.8Nms / rad,σ 2 =0.65Nms / rad,F s =2.19Nm,F c = 16.69 Nm. The position reference tracking signal is chosen as x 1d =sin(t). The parameters of the adaptive robust controller (ARC) are: k1=180, k2=60, k=20, Δ 1 =1.449,Δ 2 =17.12, Γ=diag{0.01, 0.0003, 1.0, 0.001}.
[0078] image 3 is the tracking signal expected by the system. Figure 4(a) and Figure 4(b) are the position tracking error curves of ARC and PID controllers. It can be seen from the figure that the tracking error of the ARC controller is much smaller than that of the PID controller. Figure 5 is a graph of parameter estimation by the controller designed in the present invention. It can be seen from the figure that even if the exact value of the parameter cannot be obtained, we can realize its self-adaptation through the ARC controller and obtain a good tracking effect.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More