

Multi-unmanned aerial vehicle track planning method based on culture ant colony search mechanism
A multi-UAV, trajectory planning technology, applied in two-dimensional position/course control, instruments, calculation models, etc., can solve the problem of slow search speed, simple model, and difficulty in finding the optimal trajectory of UAVs, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The following examples describe the present invention in more detail.
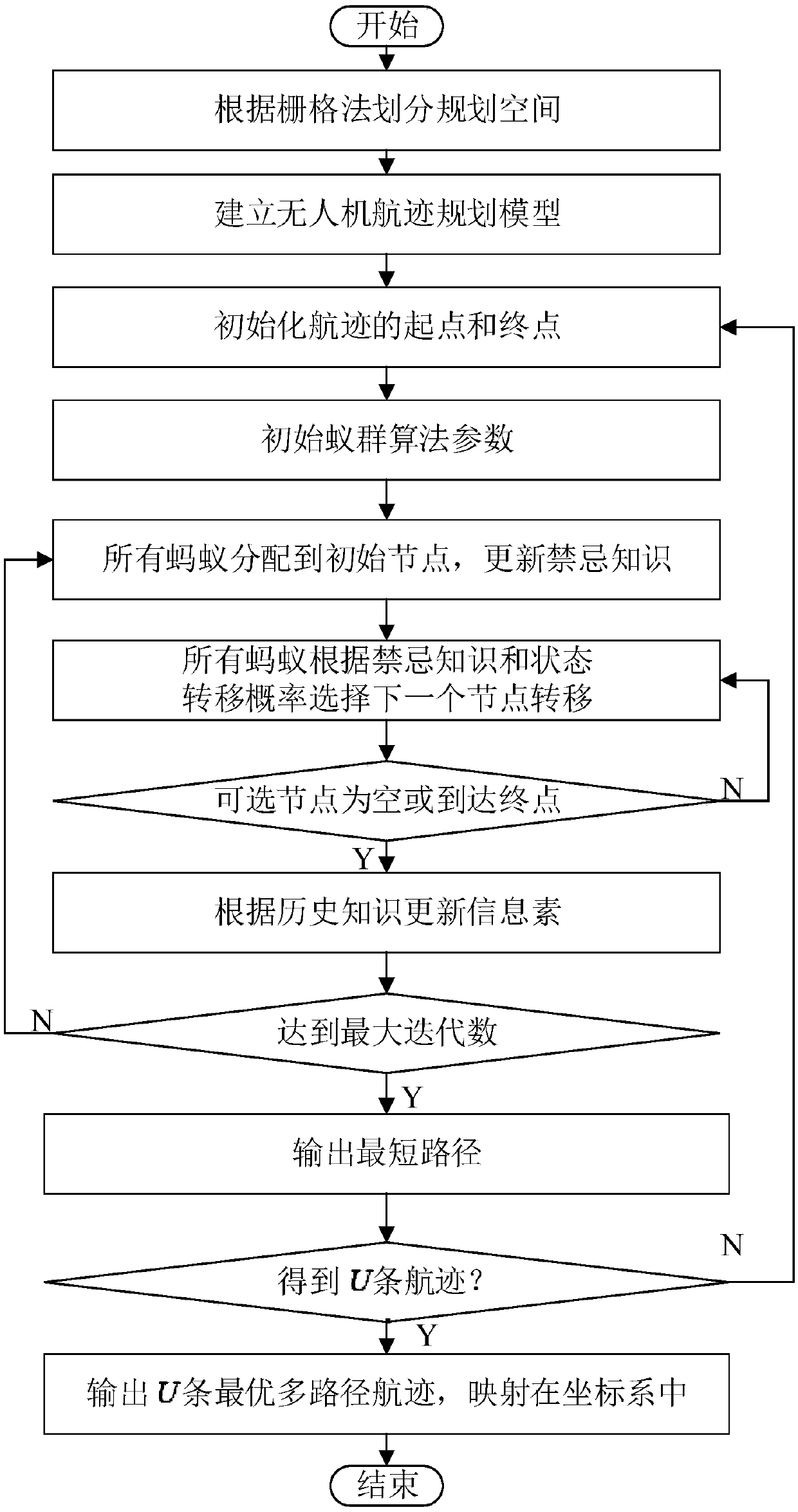
[0054] Step 1: Use the grid method to divide the planning space into grids.
[0055] Let the abscissa range of the planning space be [x min ,x max ], where x min is the minimum value of the abscissa, x max is the maximum value of the abscissa, and the range of the ordinate of the planning space is [y min ,y max ], where y min is the minimum value of the ordinate, y max is the maximum value of the ordinate. Let the grid size be N grid , then the total number of grid columns in the planning space is: The total number of grid rows is The number of common nodes N=h×q. Number all nodes in order from bottom to top and from left to right, if the i-th node p i The coordinates are (x i ,y i ), the calculation formula of its node number is:
[0056] Step 2: Establish a multi-UAV trajectory planning model.
[0057] In this model, assuming that the UAV keeps the altitude and speed constant d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More