

Robot control method, somatosensory interaction device and robot
An interactive device and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems that users cannot really feel the robot, beginners are not very good at mastering, and users are inconvenient to operate, etc. Control method, easy to use, easy to operate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
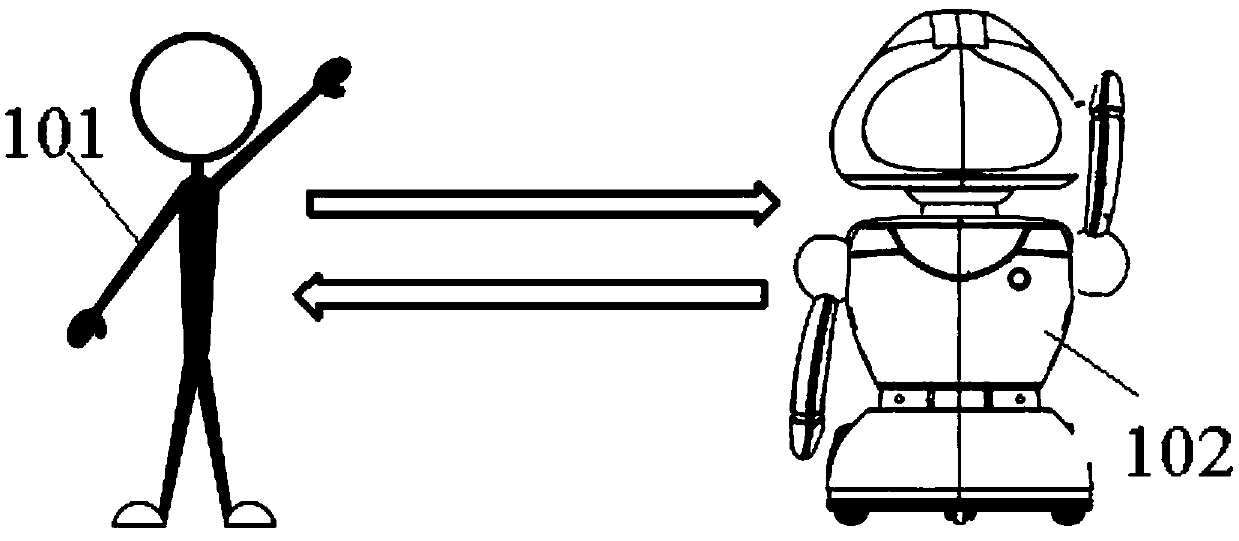
[0050] Such as figure 1 As shown, it is a conceptual model of the implementation of the robot control method of the present invention. The model includes a body-sensing interaction device 101 and a robot 102, wherein the body-sensing interaction device 101 and the robot are connected wirelessly.
[0051] Wherein, the somatosensory interaction device 101 and the robot 102 implement one-to-one wireless connection by assigning IP. At the same time, the interchangeability and compatibility between similar products are guaranteed.
[0052] In order to enable users to have an immersive operating experience and enable users to operate the robot more simply and accurately, the somatosensory interaction device 101 and the robot 102 are combined through wireless communication, and the robot is controlled through somatosensory actions to improve user experience. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More