Improved nearest point iteration point cloud registration methods
A technology of closest point iteration and point cloud registration, applied in image data processing, instrumentation, computing, etc., can solve problems such as the total number of iterations, algorithm optimization, etc., to achieve low time cost, improve convergence speed, and optimize the effect of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
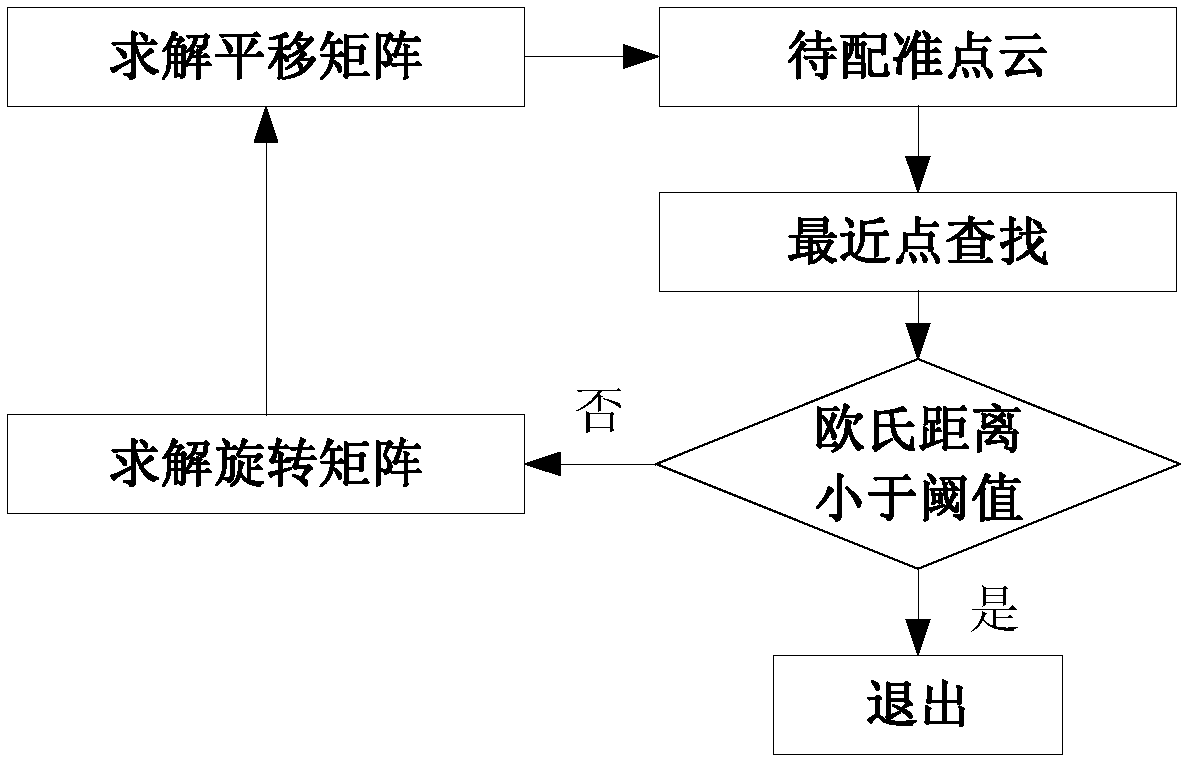
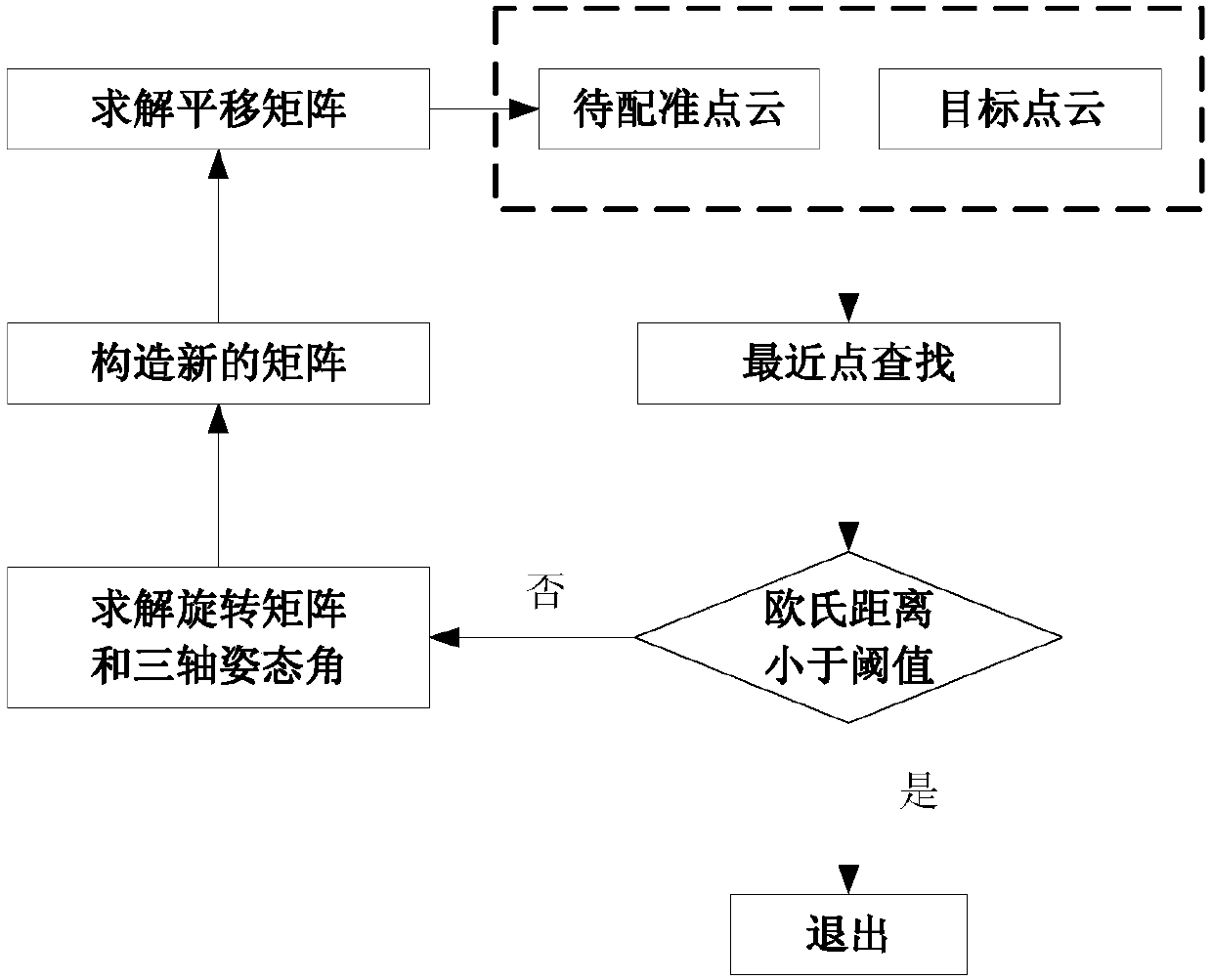
[0098] The following focuses on comparing the first improved ICP algorithm after adding the construction matrix with the classic ICP algorithm to verify the effectiveness of the improved ICP algorithm. In the comparison process, the same set of model point clouds and point clouds to be registered are used. At the same time, the nearest point search method is the same as the solution method of the rotation and translation matrix, and the Euclidean distance threshold at the end of the iteration is also the same, so that the improvement of adding the construction matrix can be fully compared The difference between the ICP algorithm and the classic ICP algorithm.
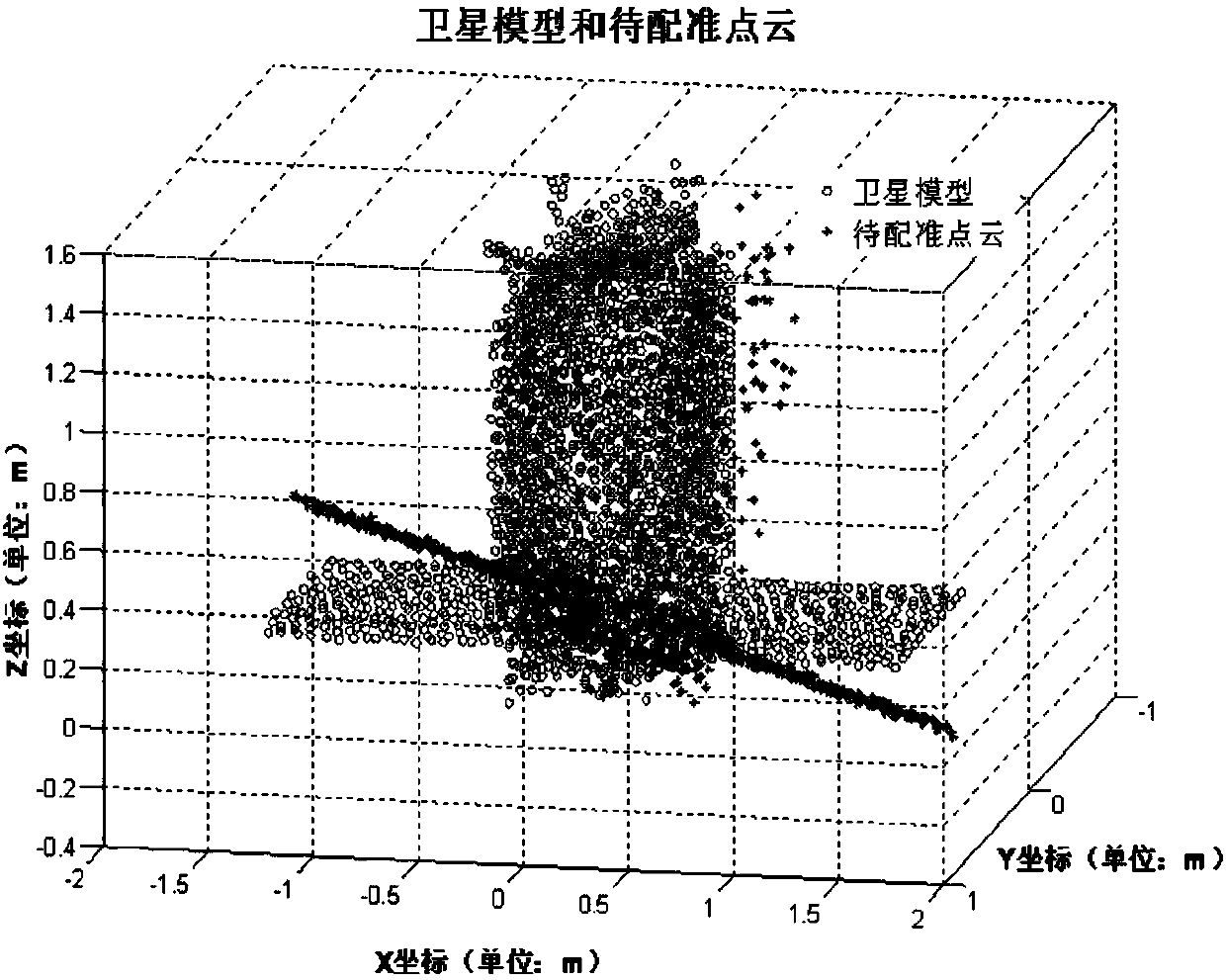
[0099] Using classic ICP and improved ICP algorithm will image 3 The point cloud data to be registered and the model data are registered to obtain the attitude of the point cloud to be registered, k 1 and k 2 Take 0.6 and 0.8 respectively. The results compared to Figure 4 and Figure 5 shown.
[0100] Figure 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More