

Robot controlling method and device based on two-dimensional code and robot
A control method and robot technology, applied in the field of robot control based on two-dimensional code, can solve the problems of large power consumption and time, long path, low efficiency, etc., to improve flexibility and accuracy, and save time and power. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Embodiments of the present application are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary, and are intended to explain the present application, and should not be construed as limiting the present application.
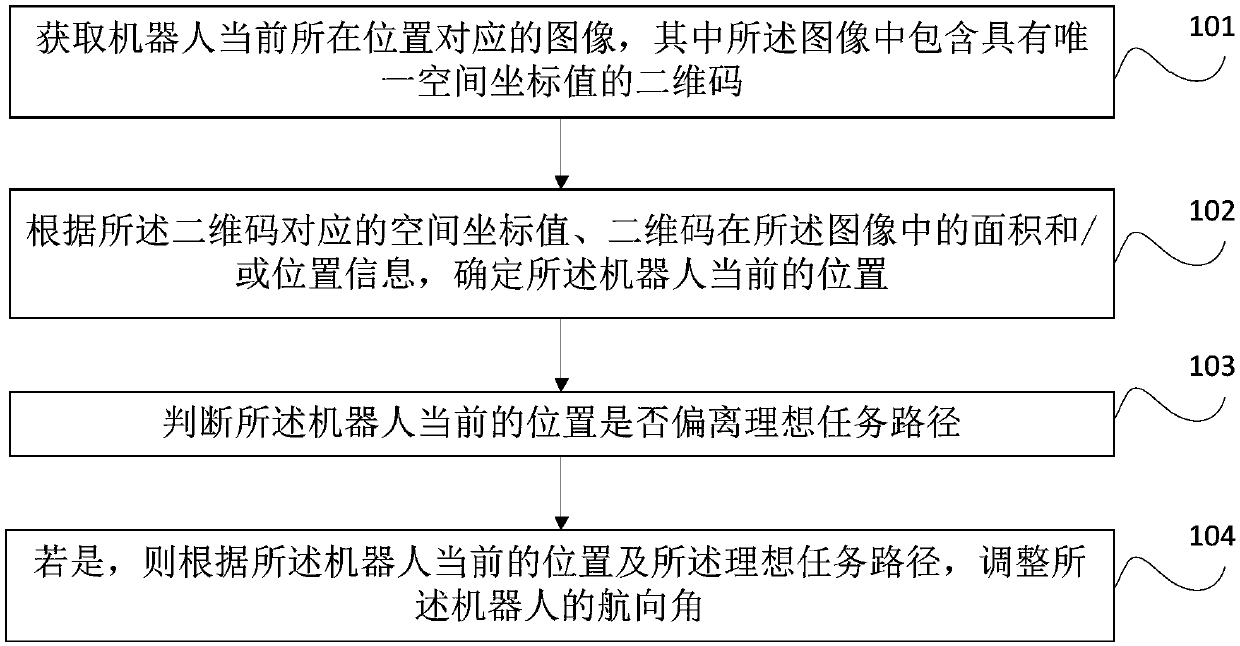
[0038] The embodiments of the present application are mainly aimed at the fact that in the prior art, it is difficult for the robot to timely and accurately determine whether its current driving route matches the ideal route sent by the dispatching server, which leads to the fact that the actual driving route of the robot to complete the task is long and consumes a lot of time. Due to the problems of high time and power consumption and low efficiency, a robot control method based on two-dimensional codes is proposed.
[0039...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More