

Transmission line inspection robot autonomous obstacle crossing control system and control method
A patrol inspection robot and control system technology, applied in control/adjustment system, non-electric variable control, vehicle position/route/height control, etc., can solve the problem of high labor intensity of patrol inspection, potential safety hazards of patrol inspectors, robot operation Obstacles and other problems, to achieve the effect of convenient and fast obstacle surmounting, and improve the efficiency of obstacle surmounting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] All the features disclosed in this specification, or all disclosed methods or steps in the process, except for mutually exclusive features and / or steps, can be combined in any manner.
[0027] Any feature disclosed in this specification (including any additional claims and abstract), unless specifically stated, can be replaced by other equivalent or alternative features with similar purposes. That is, unless otherwise stated, each feature is just one example of a series of equivalent or similar features.
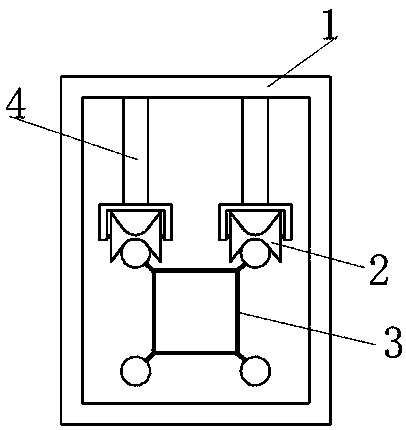
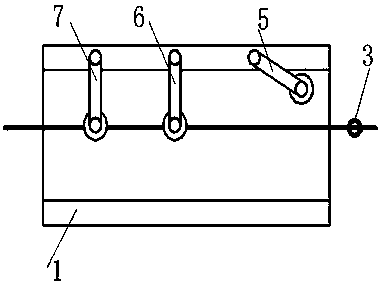
[0028] Such as figure 1 , 2 , A transmission line inspection robot, which includes a body 1, the body 1 is set on the transmission line by the support of the front walking mechanism 5, the middle walking mechanism 6 and the rear walking mechanism 7; wherein each walking mechanism includes a support The upper end of the support arm 4 is movably connected with the body 1 and the lower end is provided with a travel wheel 2, and the travel wheel 2 is arranged on the transmiss...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More