

A bionic crawling robot for inspection of high-voltage transmission lines
A technology of high-voltage transmission lines and crawling robots, which is applied in the field of inspection robots, can solve the problems of long movement time, low efficiency of obstacle surmounting, and high difficulty of control, and achieve the advantages of light overall structure, easy control process, and uniform load distribution Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
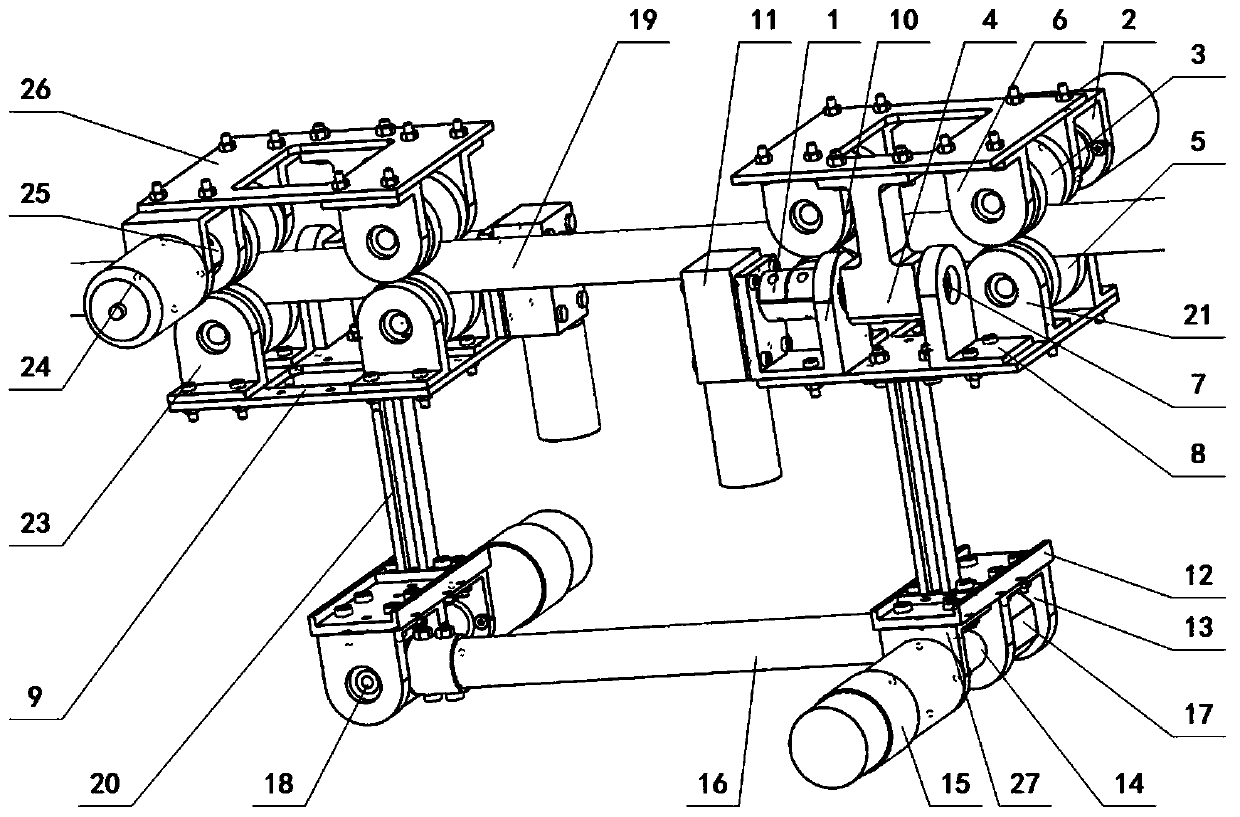
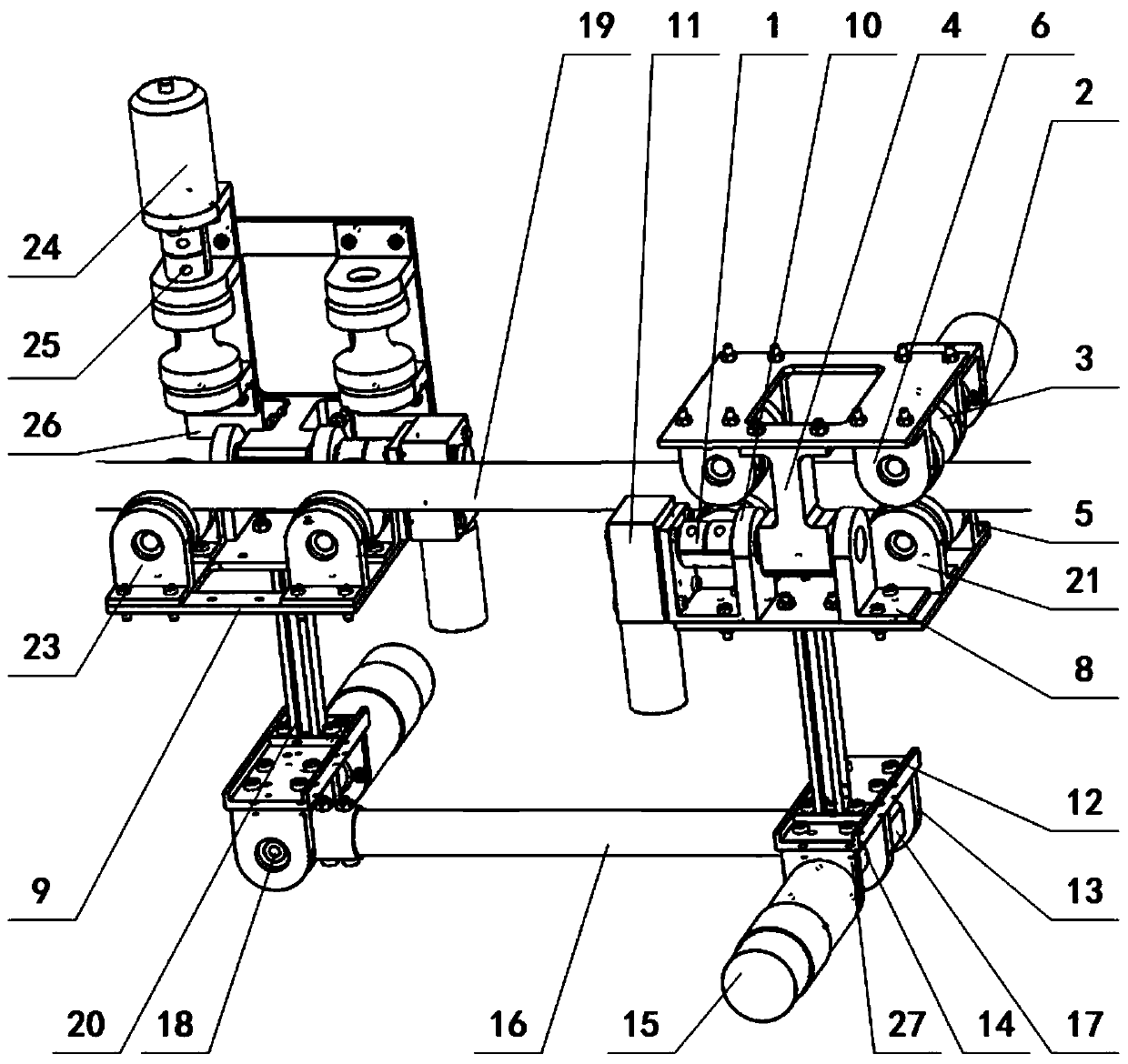
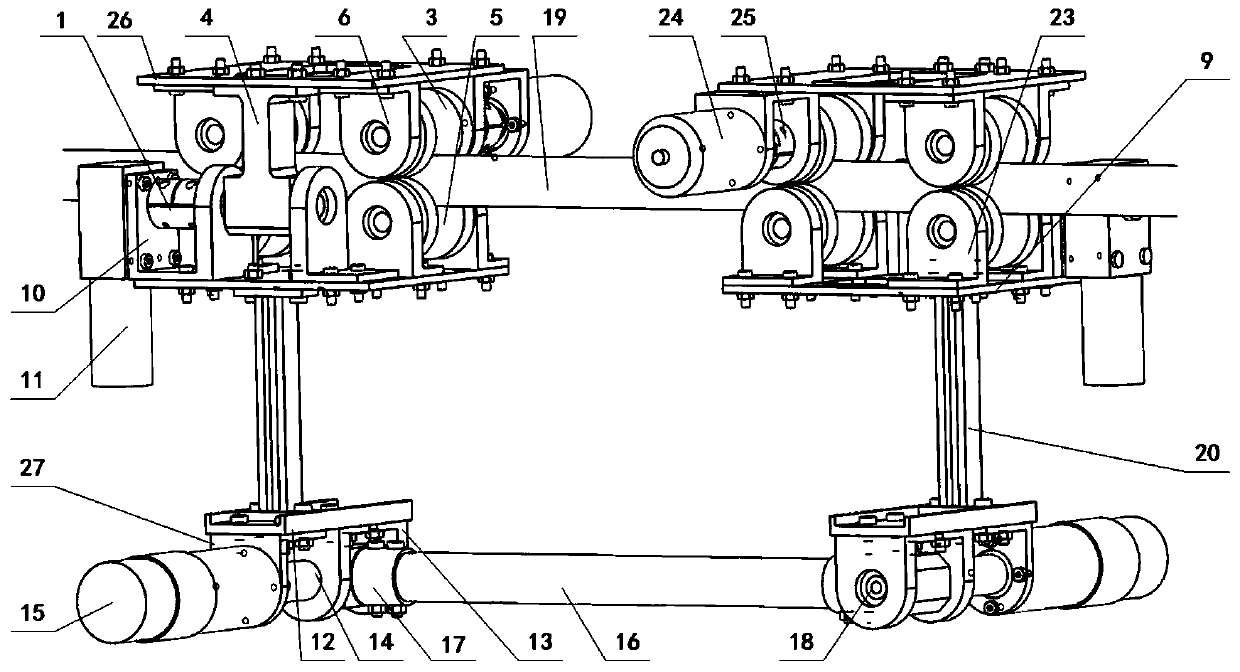
[0028] see figure 1 , a bionic crawling robot used for inspection of high-voltage transmission lines, including two claws arranged symmetrically in the center, the claws include an upper claw and a lower claw, and the upper claw and the lower claw are connected by a wrist , the wrist is connected to the shoulder through the arm 20, wherein the arm 20 is an I-shaped steel design, the upper and lower structures are symmetrical, and it is a thin plate with two through holes, and a hollow tube connecting rod is passed between the two shoulders 16 connections to form a cantilever structure.
[0029] see Figure 6 , Figure 8 , the upper claw portion includes a second driven wheel 29, the two ends of the second driven wheel 29 are respectively equipped with a first driven wheel bearing 31 and a second driven wheel bearing 32, and through the first driven wheel b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More