

A visual navigation verification method for pelvic simulation minimally invasive surgery based on 3D printing
A minimally invasive surgery and 3D printing technology, applied in the visual navigation field of minimally invasive surgery, can solve problems such as the difficulty of obtaining the real trajectory of the endoscope and the inability to verify the accuracy of the tracking algorithm, so as to improve the overlapping efficiency and enhance the visual effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038]The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
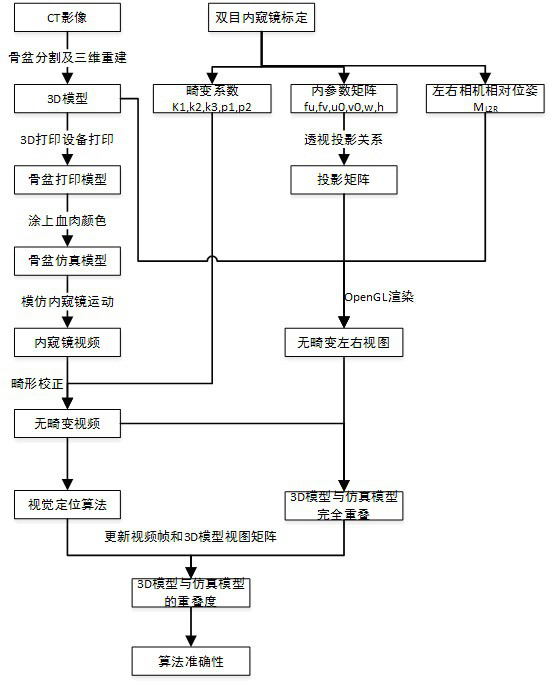
[0039] A 3D printing-based visual navigation verification method for pelvic simulation minimally invasive surgery of the present invention comprises the following steps,
[0040] S1. Segment the pelvic area according to the patient's CT image, reconstruct the 3D model of the pelvis, import the 3D model into the 3D printing device, print the printed model of the pelvis, and then paint the 3D model with various colors of surgical flesh and blood to form a simulated pelvic model with texture;
[0041] S2. Simulate the movement of the endoscope during the real operation, and use the binocular camera to shoot the endoscopic video of the simulated minimally invasive operation on the simulated pelvic model;
[0042] S3. Perform monocular camera calibration and stereo calibration on the binocular camera, obtain the internal parameter matrix of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More