

An active and passive limb rehabilitation trainer
An active-passive, trainer technology, applied in the direction of muscle training equipment, passive exercise equipment, gymnastics equipment, etc., can solve the problems of complex structure, the position of the traction mechanism of the limbs cannot be adjusted, and the rehabilitation training requirements of patients cannot be met.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
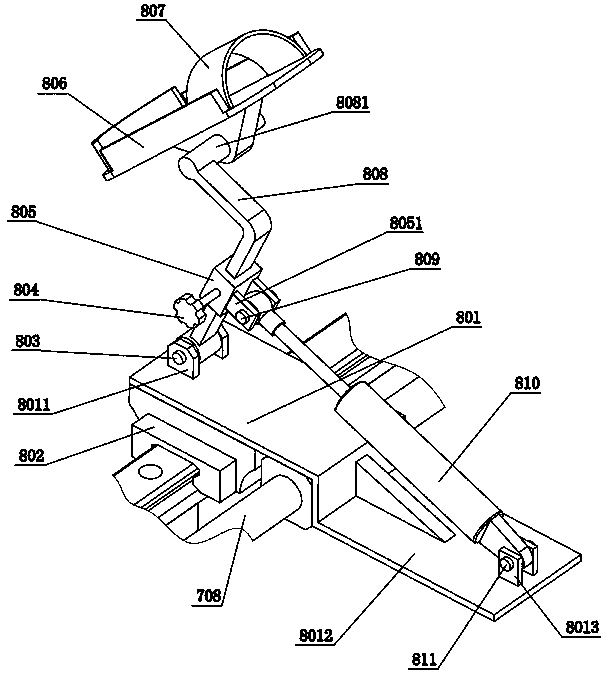
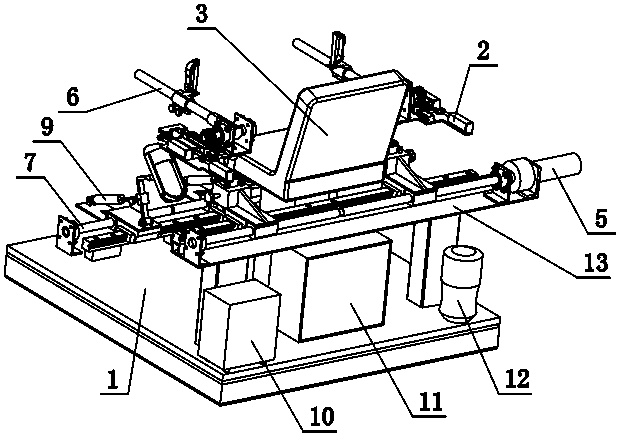
[0056]When the patient needs one side of the upper limb to drive the other side of the upper limb for rehabilitation training, the patient sits on the seat 3. If the patient's right arm can move autonomously, when the patient's left arm needs to be recovered, the servo motor is controlled to rotate at 150° , the reverse threads on both sides of the driving lead screw 1 505 drive the right nut 1 506 and the left nut 1 507 to move towards each other or reversely, and the right connecting plate 702 and the left connecting plate 602 move to realize the left upper limb mechanism 6 and the right upper limb mechanism 2 at the same time Move to the inside or outside of the patient, to adapt to the needs of the patient's shoulder width, the screw thread on the leading screw-505 and the right nut-506, the left nut-507 adopt self-locking screws, such as common triangular threads for connection, to prevent the nut from moving along Lead screw one 505 rotates independently, unscrews the rig...
Embodiment 2
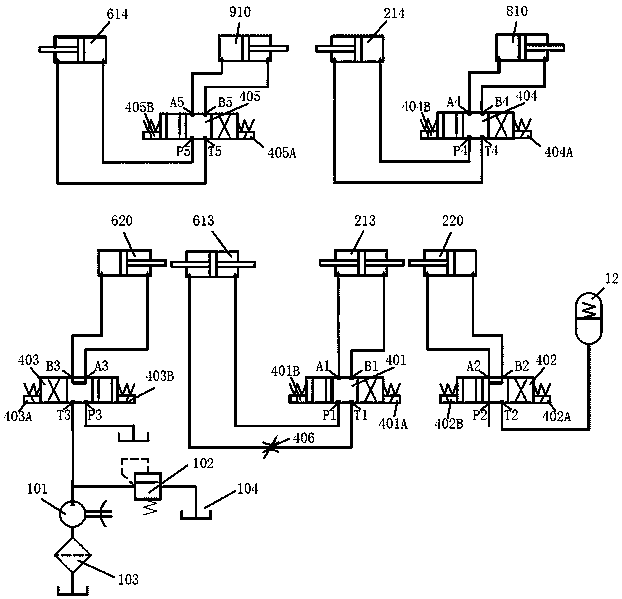
[0058] If control system 4 controls the left side electromagnet 401B of three-position four-way valve one 401 to energize, the left side electromagnet 404B of three-position four-way valve four 404 is energized, the left side electromagnet 405B of three-position four-way valve five 405 is energized, The electromagnets 403A and 403B on both sides of the three-position four-way valve three 403 are energized alternately, while the electromagnets 402A and 402B on both sides of the three-position four-way valve two 402 are not energized, the motor of the hydraulic pump 101 is energized, and the left piston cylinder three 620 The piston rod moves to drive the piston rods of the left double side rod-out piston cylinder 613 and the right oil cylinder one 614 to move, so as to realize the passive movement of the patient's bilateral limbs approximate gait.
Embodiment 3
[0060] If the control system 4 controls the energization of the right electromagnet 401A of the three-position four-way valve one 401, the patient's bilateral upper limbs move downward synchronously, and at the same time controls the power-on of the left electromagnet 404B of the three-position four-way valve four 404, three-position four-way valve four 404 The left electromagnet 405B of the five-way valve 405 is energized, the electromagnets 403A and 403B on both sides of the three-position four-way valve three 403 are not energized, the left electromagnet 402B of the three-position four-way valve two 402 is energized, and the motor of the hydraulic pump 101 Without electricity, the oil inlet A2 of the three-position four-way valve 2 402 is connected to the pressure port P2, the oil outlet B2 is connected to the oil return port T2, the upper limbs on both sides swing downward, and the right piston cylinder 3 220 passes through the three-position four-way valve The air in the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More