

Horizontal reentrant corner climbing robot
A robot and inner corner technology, applied in the field of climbing robots, can solve the problems of insufficient load capacity, high requirements, low energy utilization rate, etc., and achieve the effect of increasing friction and maintaining high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
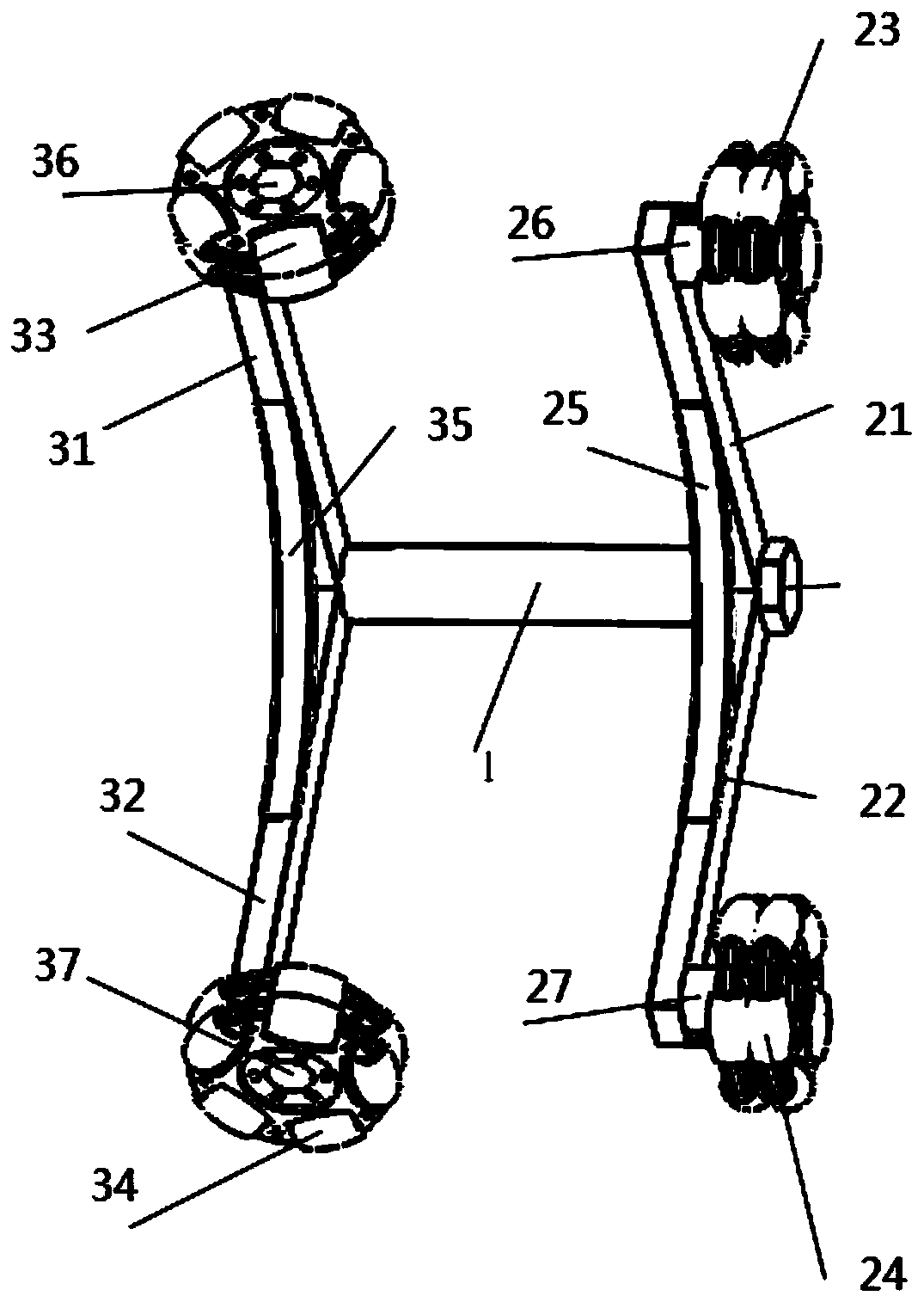
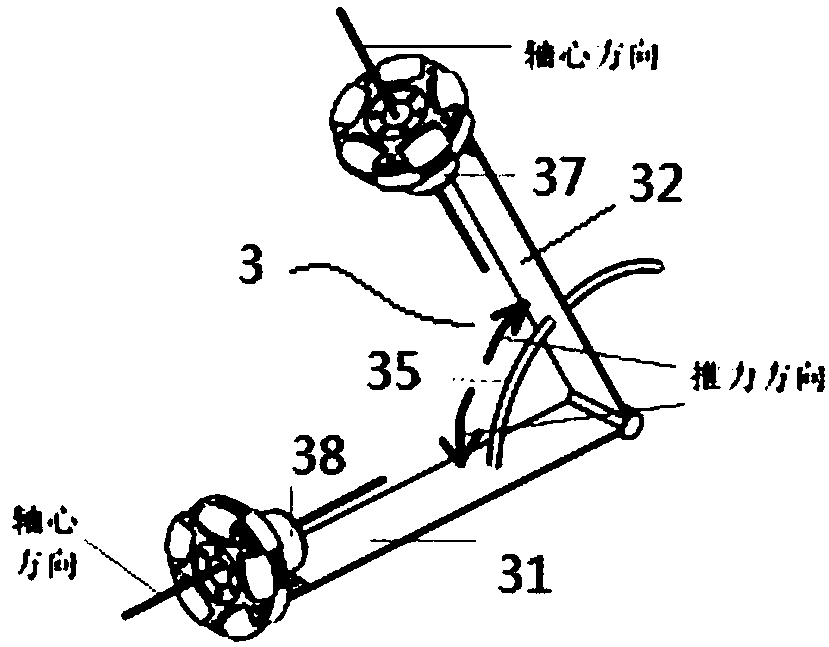
[0023] The invention discloses a climbing robot which utilizes a horizontal inner corner to climb and can move left and right. It includes a bracket 1 and at least one attachment structure and action structure arranged on the bracket. The number of attachment bodies is N (N=1, 2, 3...), and the number of action bodies is M (M=1, 2, 3...). Such as figure 1 As shown, it includes an attachment structure 2 and an action structure 3 .
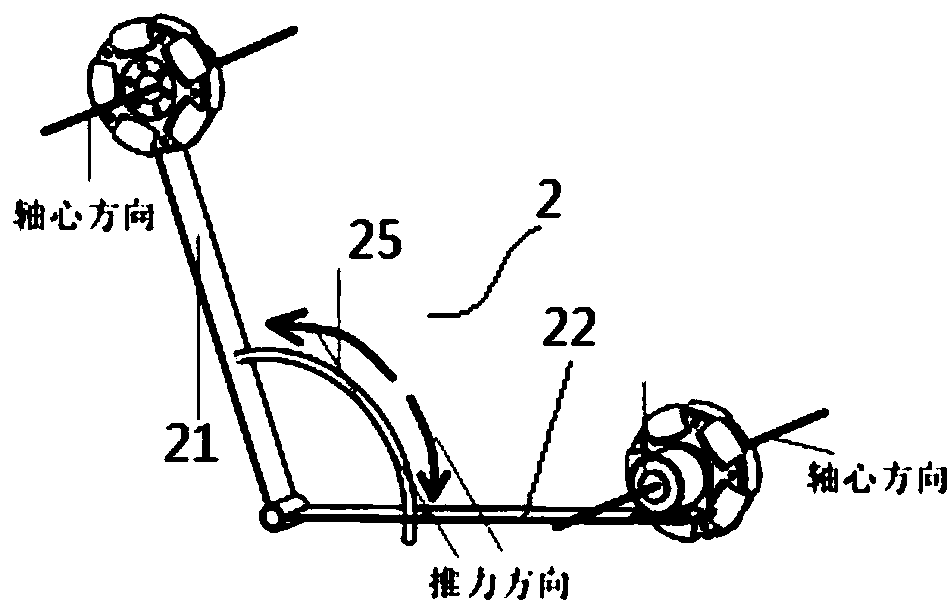
[0024] Such as figure 2 It is a structural schematic diagram of the attachment structure 2, including the left bracket I21 and the right bracket I22 and the driving wheels 23 and 24 symmetrically arranged on the left bracket I21 and the right bracket I22, the left bracket I21 and the right bracket I22 are hinged with the bracket 1, and The angle between them is greater than the inner corner of the wall corne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More