

Method for calculating pose of vehicle at curve
A calculation method and technology for curves, applied in the field of vehicle pose calculation in curves, can solve the problems of inappropriate calculation, large error and high cost, and achieve the effect of small error, high accuracy and low accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0097] In this embodiment, the curve in front of the navigation building of Wuhan University of Technology is used as the test site, and all the pictures taken by the vehicle-mounted camera system are 1920*1200 (pixels).
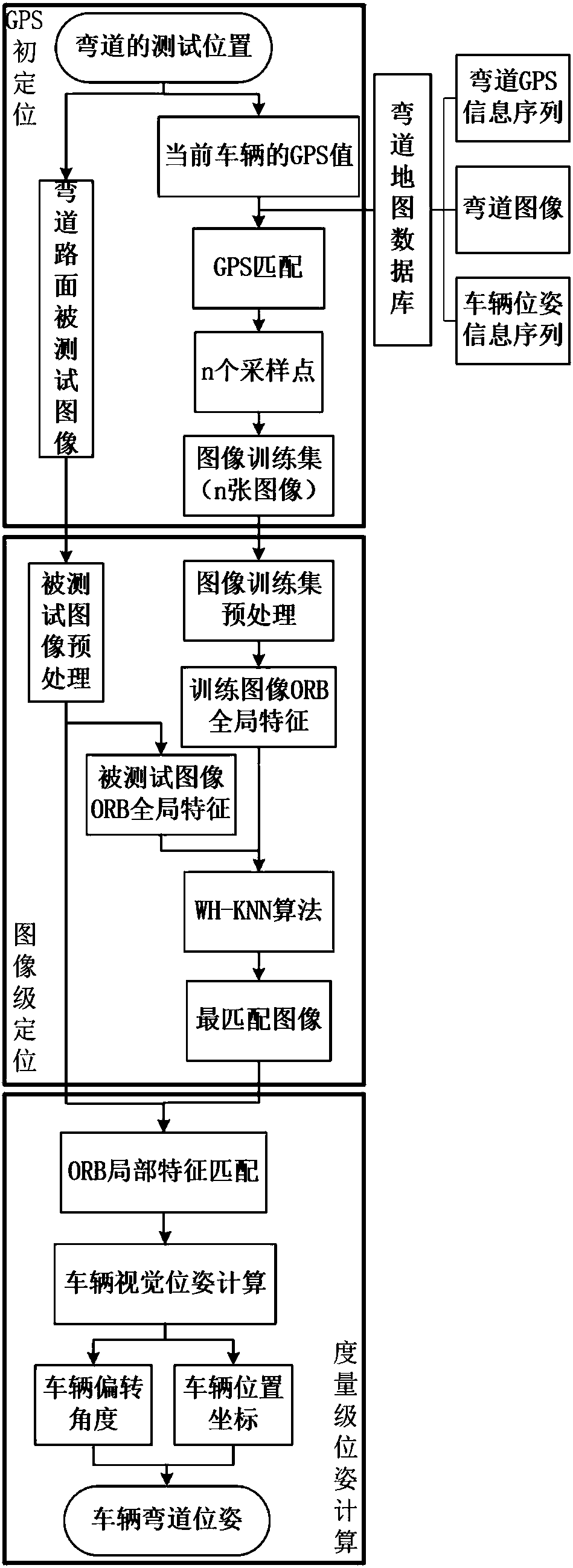
[0098] The vehicle pose calculation method of the curve in this embodiment includes the following steps:
[0099] The first step is to build a curve map database:
[0100] 1-1. Collection of curve GPS information sequence:
[0101] Use the on-board GPS acquisition device to obtain the current GPS value of the vehicle. The vehicle is at the road center of the curve and the body is parallel to the tangent of the curve to collect GPS information every 1m, and a total of 25 GPS values are collected. The number of sampling points is also 25, and the GPS sequence of the curve can be obtained by traversing all the sampling points, which consists of 25 sets of latitude and longitude values;
[0102] 1-2. Collect curved road surface images:
[0103]The acquisit...
Embodiment 2
[0135] In addition to "choose the curved area in front of the Nautical Building of Wuhan University of Technology as the positioning area, in this area, GPS information is collected every 0.5 meters at the center of the curved road, and the GPS position is collected as the sampling point. Collect and store the GPS information sequence of the curve, the road surface image series of the curve sampling point, and the vehicle pose information sequence of the curve sampling point into the curve map database, thereby constructing the curve map database and performing 40 Group test experiment ", other is with embodiment 1.
Embodiment 3
[0137]In addition to "choose the curved area of Chengxiao Road, Hebei University of Technology as the positioning area, in this area, GPS information is collected every 0.5 meters at the center of the curved road, and the GPS position is collected as the sampling point. Collect and store the GPS information sequence of the curve, the road surface image series of the curve sampling point, and the vehicle pose information sequence of the curve sampling point into the curve map database, thereby constructing the curve map database and performing 25 Group test experiment ", other is with embodiment 1.
[0138] After a series of comparisons between the real coordinates of the points to be located and the position coordinates calculated by the method of Examples 1-3, it is proved that the method of the present invention can realize high-precision calculation of the pose of the curved vehicle, and the calculation results are at the measurement level (centimeter level).
[0139] Wha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More