Flexible shoulder joint rehabilitation exoskeleton mechanism
A shoulder joint and exoskeleton technology, applied in the field of medical robots, to achieve the effect of avoiding rigid impact, avoiding secondary injuries, and high position accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
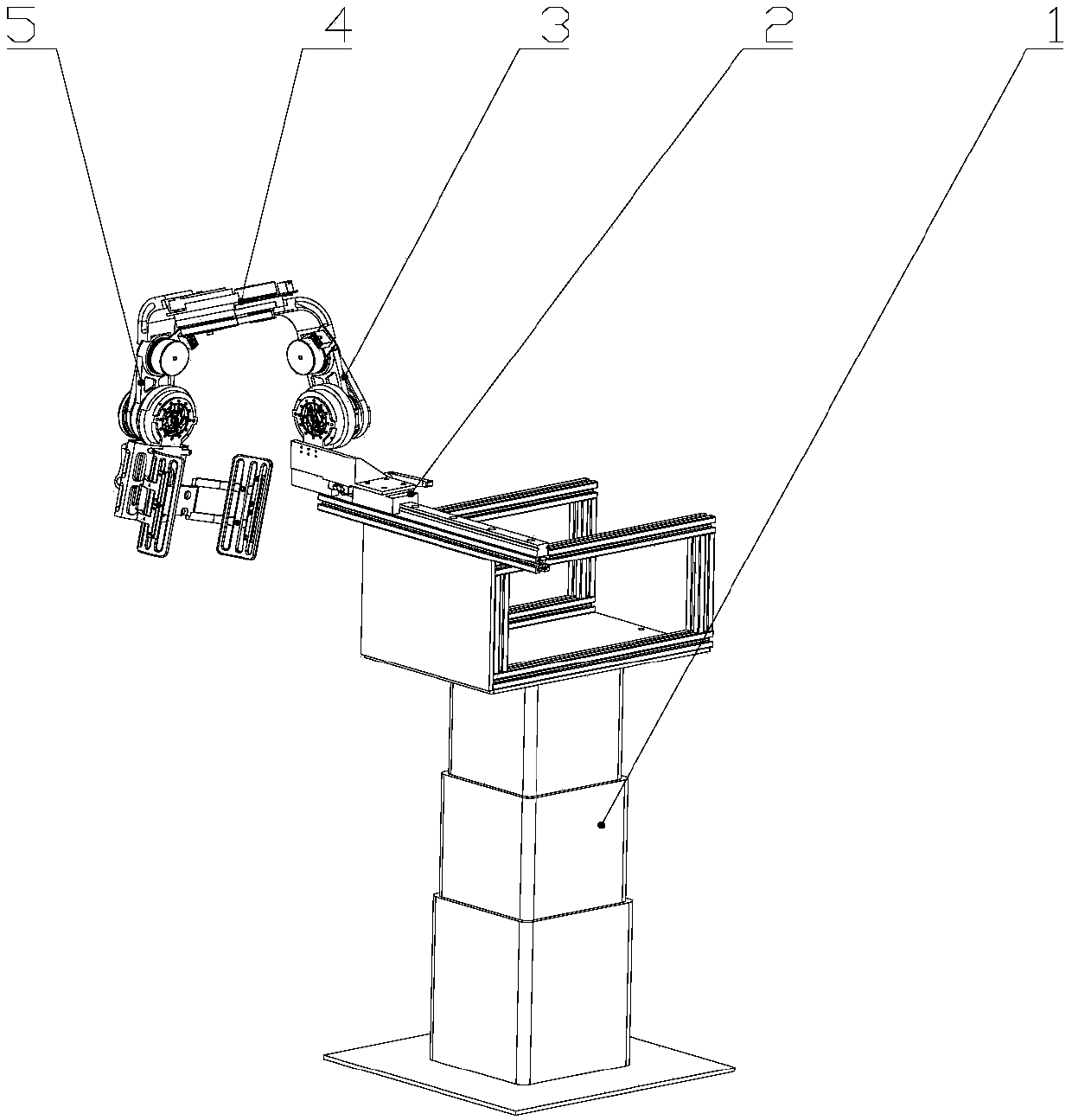
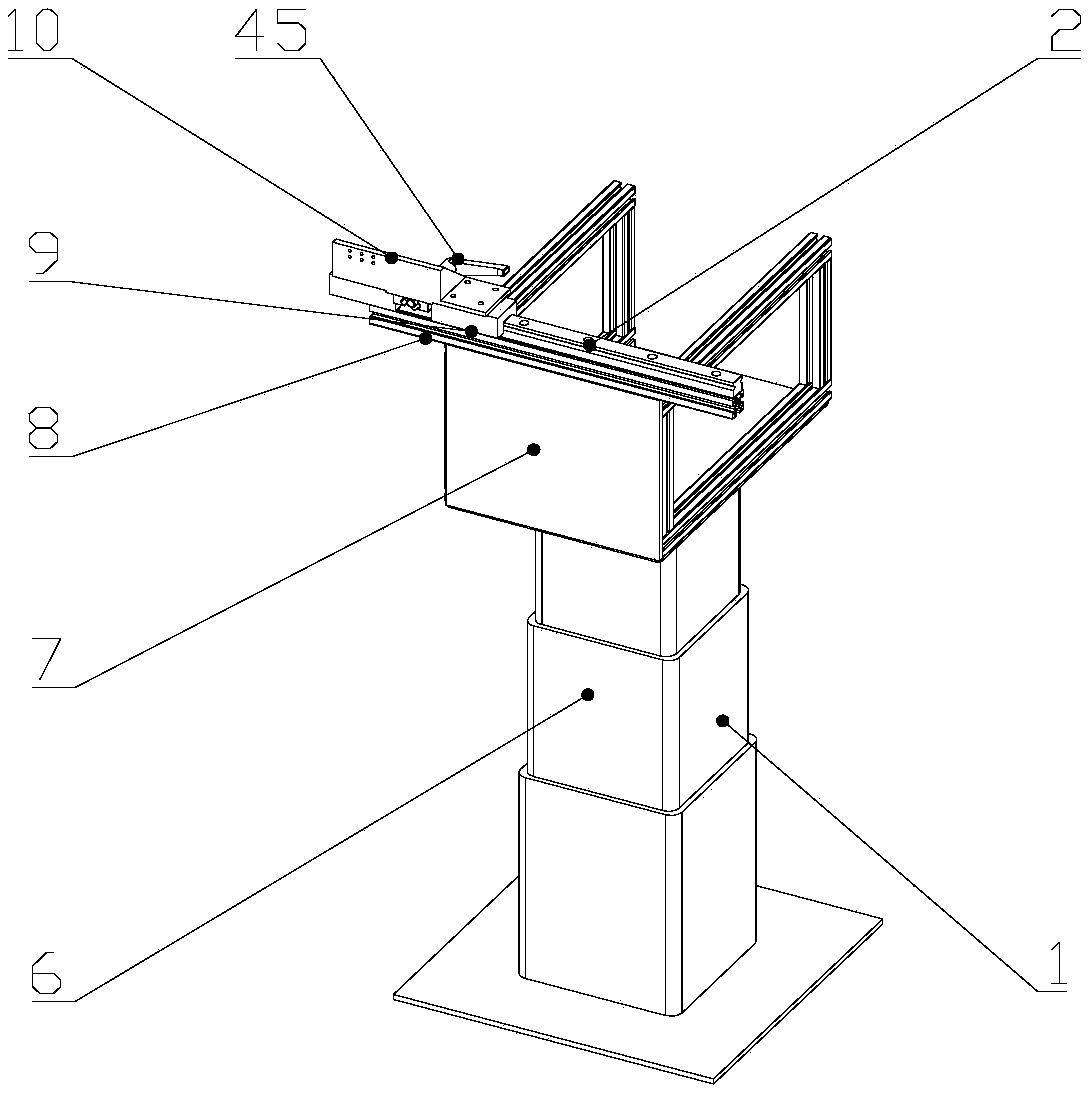
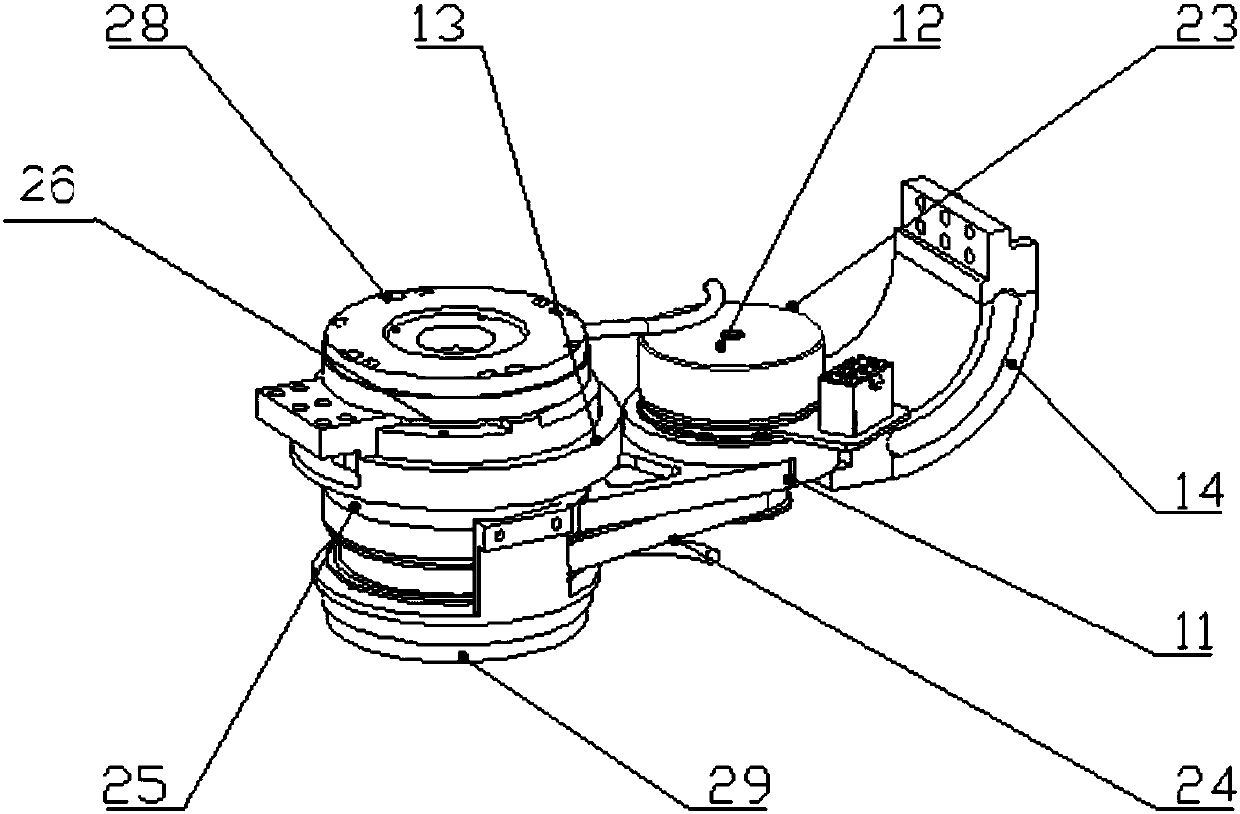
[0026] Such as Figure 1-6As shown, a flexible shoulder joint rehabilitation exoskeleton mechanism includes a telescopic support frame 1, a shoulder joint adjustment mechanism 2, a large arm side lift joint 3, a large arm abduction joint 4, a large arm forward lift joint 5, an automatic lifting Column 6, back chassis 7, exoskeleton slide rail 8, shoulder joint slider 9, back fixing frame 10, first joint motor frame 11, first rotation drive device 12, first limit mechanism 13, arm side lift output 14. The second joint motor frame 15, the second rotation drive device 16, the second limit mechanism 17, the boom outreach output 18, the third joint motor frame 19, the third rotation drive device 20, and the third limit mechanism 21 , the boom fixing mechanism 22, the first drive motor 23, the first synchronous pulley set 24, the first harmonic reducer 25, the first elastic mechanism 26, the first angle sensor 28, the second angle sensor 29, the second drive Motor 30, second synchr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com