

A Gesture Recognition Method Based on Depth Sensor
A depth sensor and gesture recognition technology, which is applied in the field of gesture recognition based on depth sensors, can solve the problems of algorithm efficiency, recognition accuracy and stability model data packet size defects, restricting the application of gesture recognition technology, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
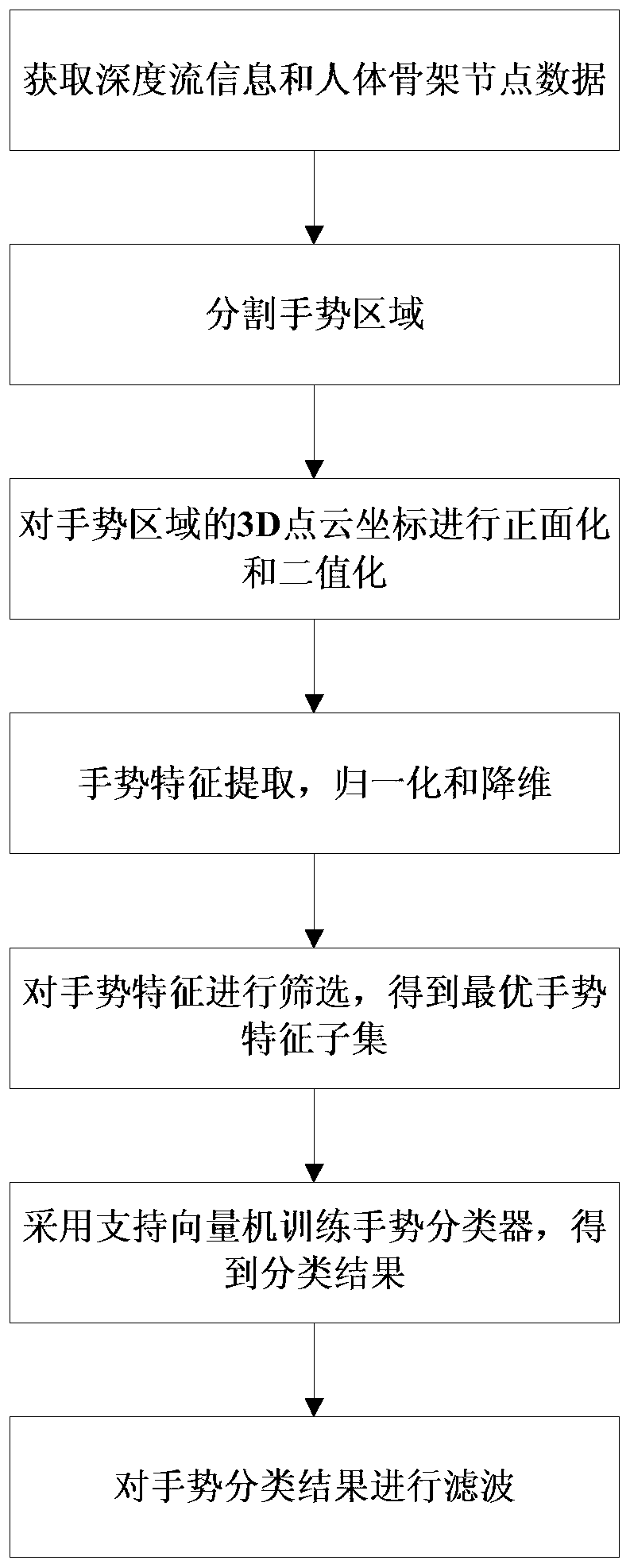
[0061] A gesture recognition method based on a depth sensor, such as figure 1 As shown, the specific steps are as follows.
[0062] 1. Obtain depth flow information and human skeleton nodes through 3D depth sensor
[0063] 2. Gesture segmentation
[0064] After the depth device collects the depth flow information and human skeleton nodes, it will segment the hand area to obtain the 3D point cloud coordinates that only include the gesture area. The specific steps are as follows:
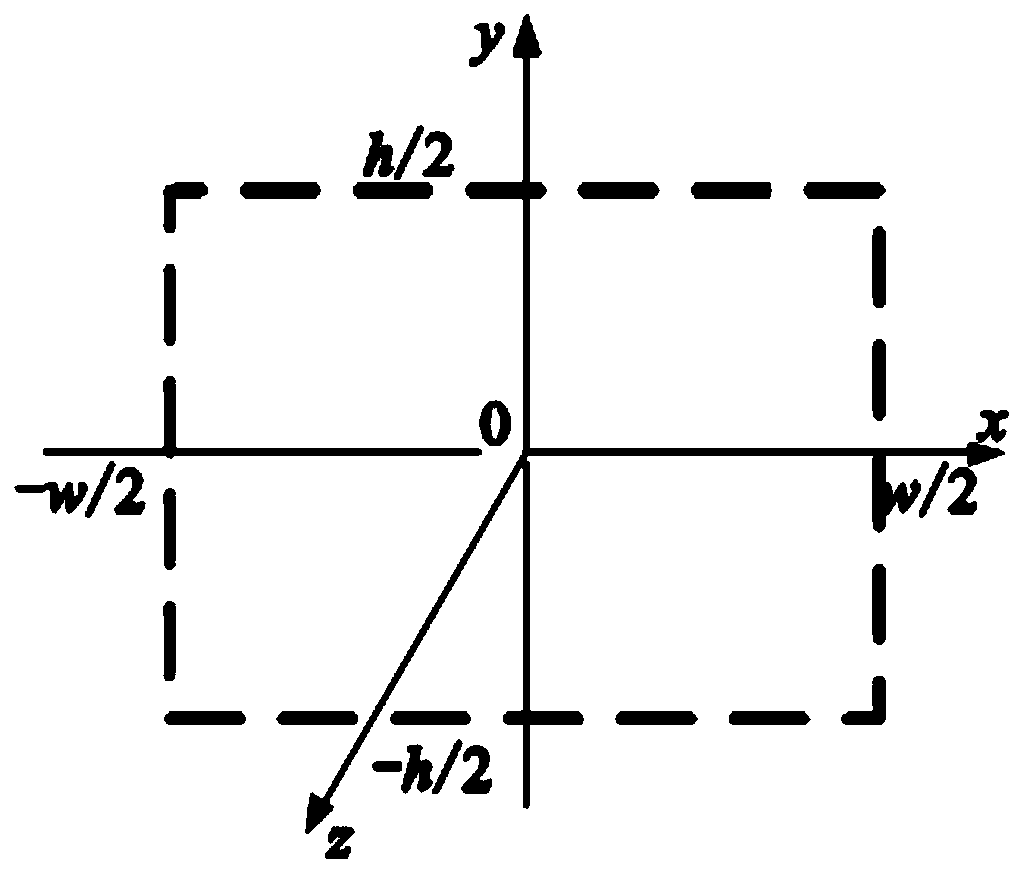
[0065] figure 2 The w*h plane image acquired for the depth device, which takes the center of the image as the origin. Because the depth value collected directly from the depth device is not the actual distance. So it needs to be converted to an actual depth distance value:
[0066] d=K*tan(d raw / 2842.5+1.1863)-0.037
[0067] K=0.1236m,d raw Represents ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More