

Automatic station detection method of public transport vehicle in line operation progress
A technology for automatic detection and public transportation, which is applied in the traffic control system of road vehicles, traffic control systems, instruments, etc., to achieve the effects of improving accuracy, ensuring accuracy, and increasing economic and social benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
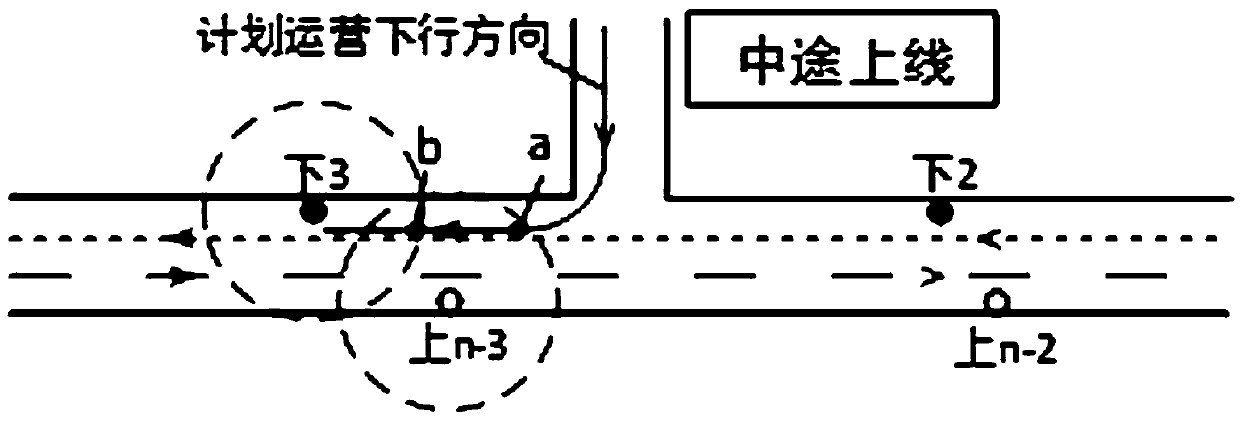
[0032] Embodiment 1: An automatic site detection method for public transport vehicles during line operation. In this method, during the operation and driving process of public transport vehicles, the vehicle-mounted terminal acquires updated current vehicle position coordinates, azimuth angles, speeds, etc. according to satellite positioning The information self-identifies and adjusts the current driving direction of the vehicle, judges when driving into or out of the station, and updates the current station sequence. It can complete the automatic detection of station types including conventional lines, circular lines, scoop lines, and cross-shaped lines. And it can automatically judge various situations such as going online midway, detours and U-turns midway to ensure the accuracy of automatic site detection.
[0033] This method correctly judges the implementation of station detection in the following scenarios according to the current station number and the state of the driv...
Embodiment 2
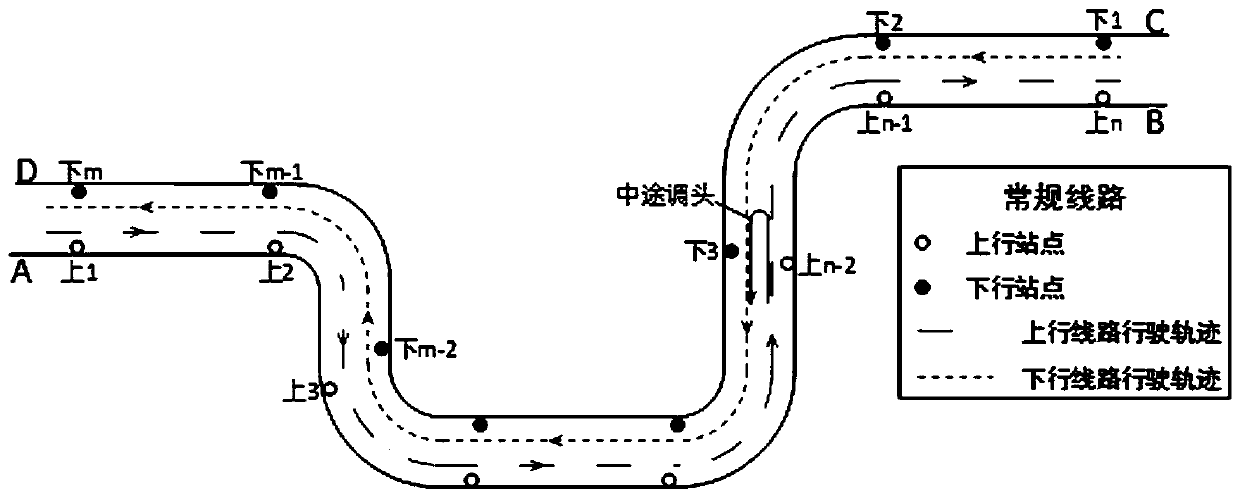
[0055] Embodiment 2: On the basis of Embodiment 1, for the line types that do not have overlapping parts in the line track of the same operating direction such as "conventional line" and "circular line", the attributes of each station in the current direction "the azimuth detection sign of the current direction station" control All characters can be set to "no detection" by default, which can reduce the judgment conditions for entering the station in the current direction and improve the success rate of station detection. The reason for this is that during the driving process of the vehicle, the driving azimuth angle in the position data obtained by the vehicle terminal may drift. If all azimuth angles are detected, it may cause the detected inbound process to be due to the azimuth mismatch. Unable to enter the station correctly, line type such as figure 2 shown. Assuming that the current operating direction is the uplink direction, when the vehicle is driving from point A t...
Embodiment 3
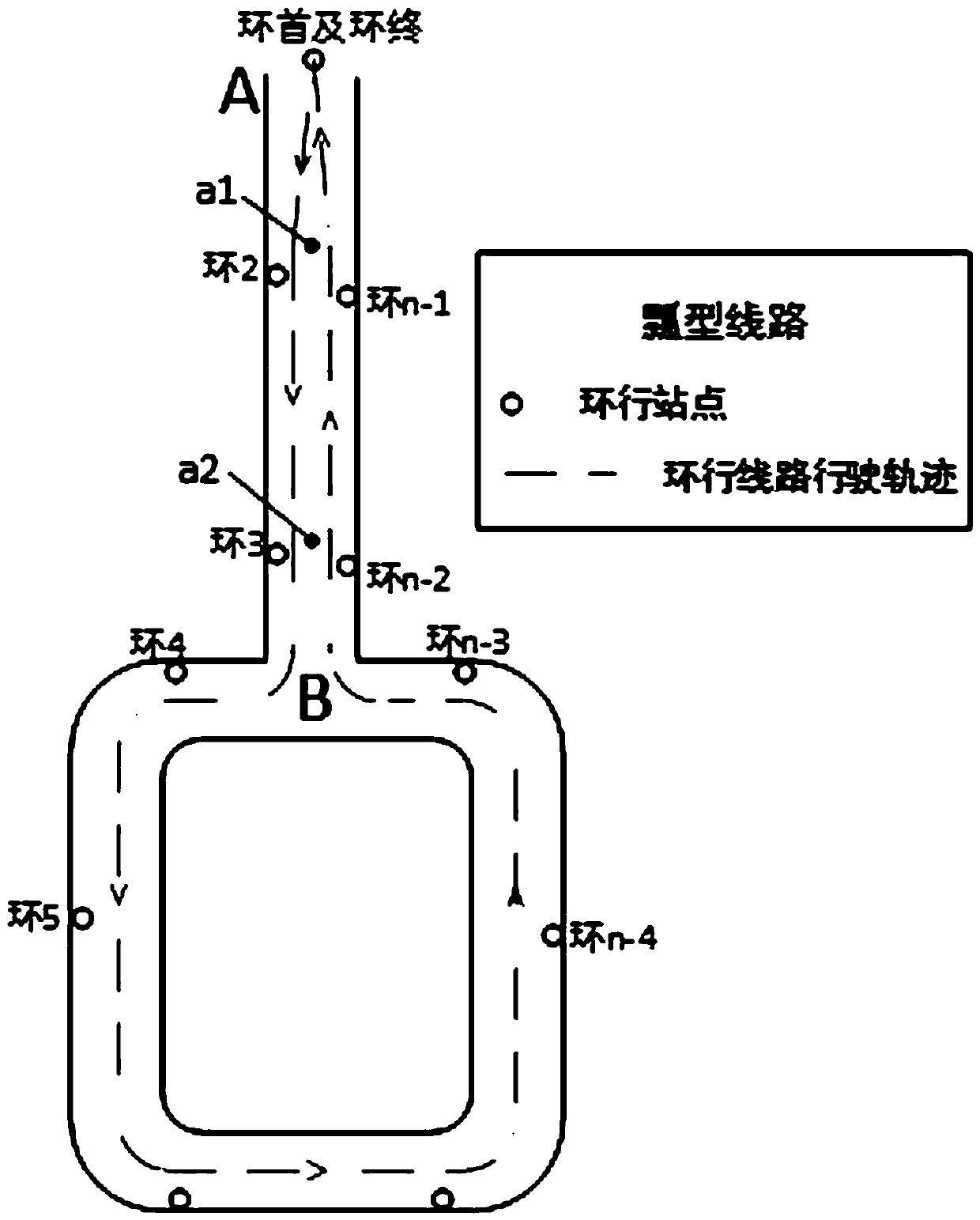
[0056] Embodiment 3: On the basis of Embodiment 1, there are trajectory overlapping parts or intersecting lines in the same operating direction for "scoop-type lines" or "cross-type lines", and there are stops with different station sequences in the overlapping parts or intersections The type of line, usually the overlapping part of the site has different inbound azimuths, and the driving trajectory is as follows Figure 4 indicated by the arrow in the middle.
[0057] The scoop-shaped line track starts from point A, passes through point B and follows the circular route as shown by the arrow, and returns to point A along the B-A road section after passing through point B again. The A-B road section and the B-A road section on the way are overlapping lines in this line type, and there are four stations of ring 2, ring 3, ring n-2 and ring n-1. The vehicle driving to position a1 may enter the ring 2 and ring n-1 stations in the current direction. At this time, in order to corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More